
Sensores Fotoeléctricos
Los sensores fotoeléctricos emiten un haz de luz que detecta la presencia o ausencia de elementos y equipos o cambios en las condiciones de la superficie.
| Serie Imagen | Nombre de la Serie | Alcance Opuesto (m) | Alcance Retrorreflectivo No Polarizado (m) | Alcance Retrorreflectivo Polarizado (m) | Alcance Retrorreflectivo Polarizado del Láser (m) | Alcance Difuso (mm) | Alcance de Campo Fijo (mm) | Alcance de Campo Ajustable (mm) | Tipo de Emisor | Material de la Carcasa | Clasificación IP | Tiempo de Respuesta (μs) | Temperatura de Funcionamiento | IO-Link | Detección de Objetos Claros |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
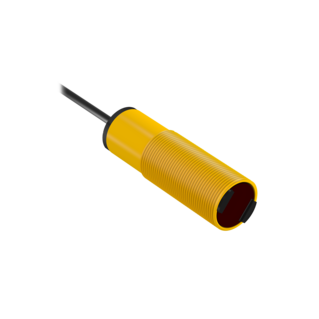
Serie Imagen  |
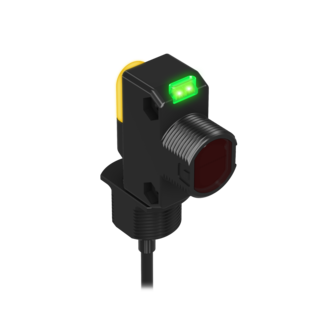
Nombre de la Serie Q120R | Alcance Opuesto 20 (m) | Alcance Retrorreflectivo No Polarizado 6.5 (m) | Alcance Retrorreflectivo Polarizado 3.5 (m) | Alcance Retrorreflectivo Polarizado Láser 10 (m) | Alcance Difuso 600 (mm) | Alcance de Campo Fijo 200 (mm) | Alcance de Campo Ajustable 350 (mm) | Tipo de Emisor LED y Láser | Material de la Carcasa Plástico | Clasificación IP IP67 | Tiempo de Respuesta (μs) 600-800 | Temperatura de Funcionamiento de -20 a +70 °C | IO-Link ✅ SÍ | Detección de Objetos Claros ✅ SI |
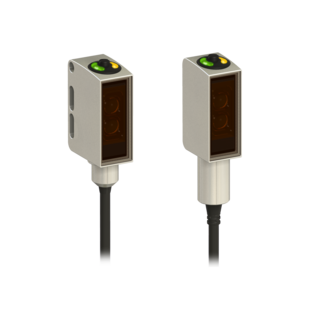
Serie Imagen  |
Nombre de la Serie Q120R | Alcance Opuesto 20 (m) | Alcance Retrorreflectivo No Polarizado 6 (m) | Alcance Retrorreflectivo Polarizado 4 (m) | Alcance Retrorreflectivo Polarizado Láser (m) — | Alcance Difuso 1500 (mm) | Alcance de Campo Fijo 150 (mm) | Alcance de Campo Ajustable 400 (mm) | Tipo de Emisor LED | Material de la Carcasa Plástico | Clasificación IP IP67 | Tiempo de Respuesta (μs) 850-1000 | Temperatura de Funcionamiento de -20 a +60 °C | IO-Link ✅ SÍ | Detección de Objetos Claros 🚫 NO |
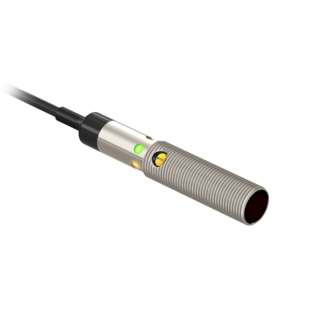
Serie Imagen  |
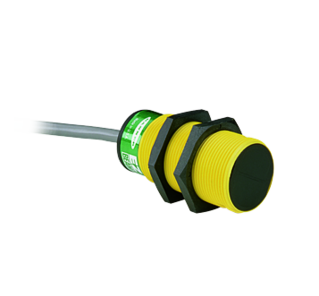
Nombre de la Serie T30R | Alcance Opuesto 60 (m) | Alcance Retrorreflectivo No Polarizado 12 (m) | Alcance Retrorreflectivo Polarizado 8 (m) | Alcance Retrorreflectivo Polarizado Láser 18 (m) | Alcance Difuso 1400 (mm) | Alcance de Campo Fijo 600 (mm) | Alcance de Campo Ajustable 600 (mm) | Tipo de Emisor LED y láser | Material de la Carcasa Plástico | Clasificación IP IP67 | Tiempo de Respuesta (μs) 2000-5000 | Temperatura de Funcionamiento -20 a +70 °C | IO-Link 🚫 NO | Detección de Objetos Claros ✅ SI |
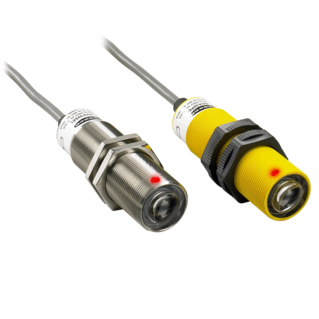
Serie Imagen  |
Nombre de la Serie T30RW | Alcance Opuesto 25 (m) | Alcance Retrorreflectivo No Polarizado (m) — | Alcance Retrorreflectivo Polarizado 6 (m) | Alcance Retrorreflectivo Polarizado Láser (m) — | Alcance Difuso 750 (mm) | Alcance de Campo Fijo 200 (mm) | Alcance de Campo Ajustable (mm) –- | Tipo de Emisor LED | Material de la Carcasa Plástico | Clasificación IP IP67, IP68, IP69K | Tiempo de Respuesta (μs) 1500-2000 | Temperatura de Funcionamiento -40 a +70 °C | IO-Link 🚫 NO | Detección de Objetos Claros 🚫 NO |
Serie Imagen  |
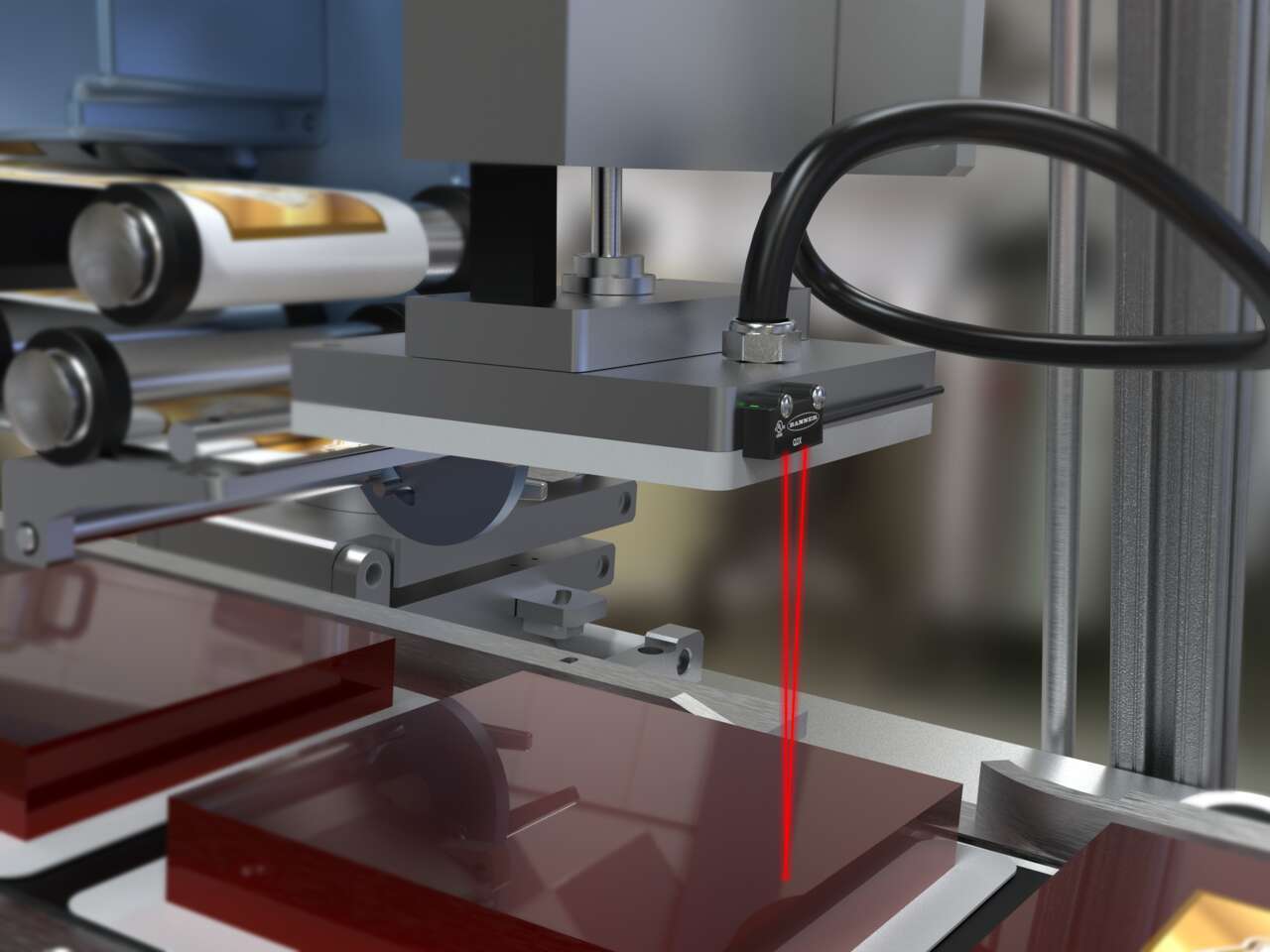
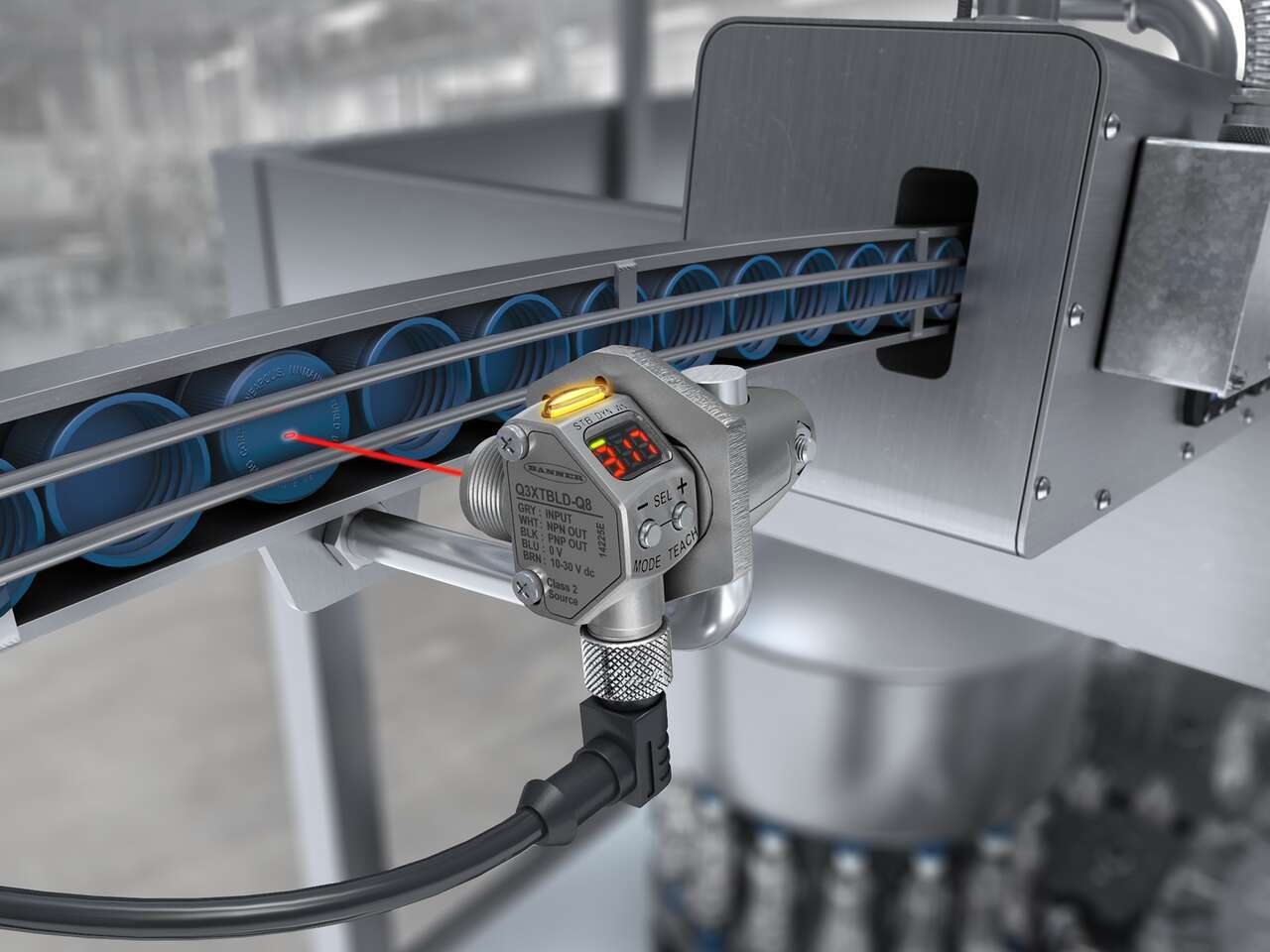
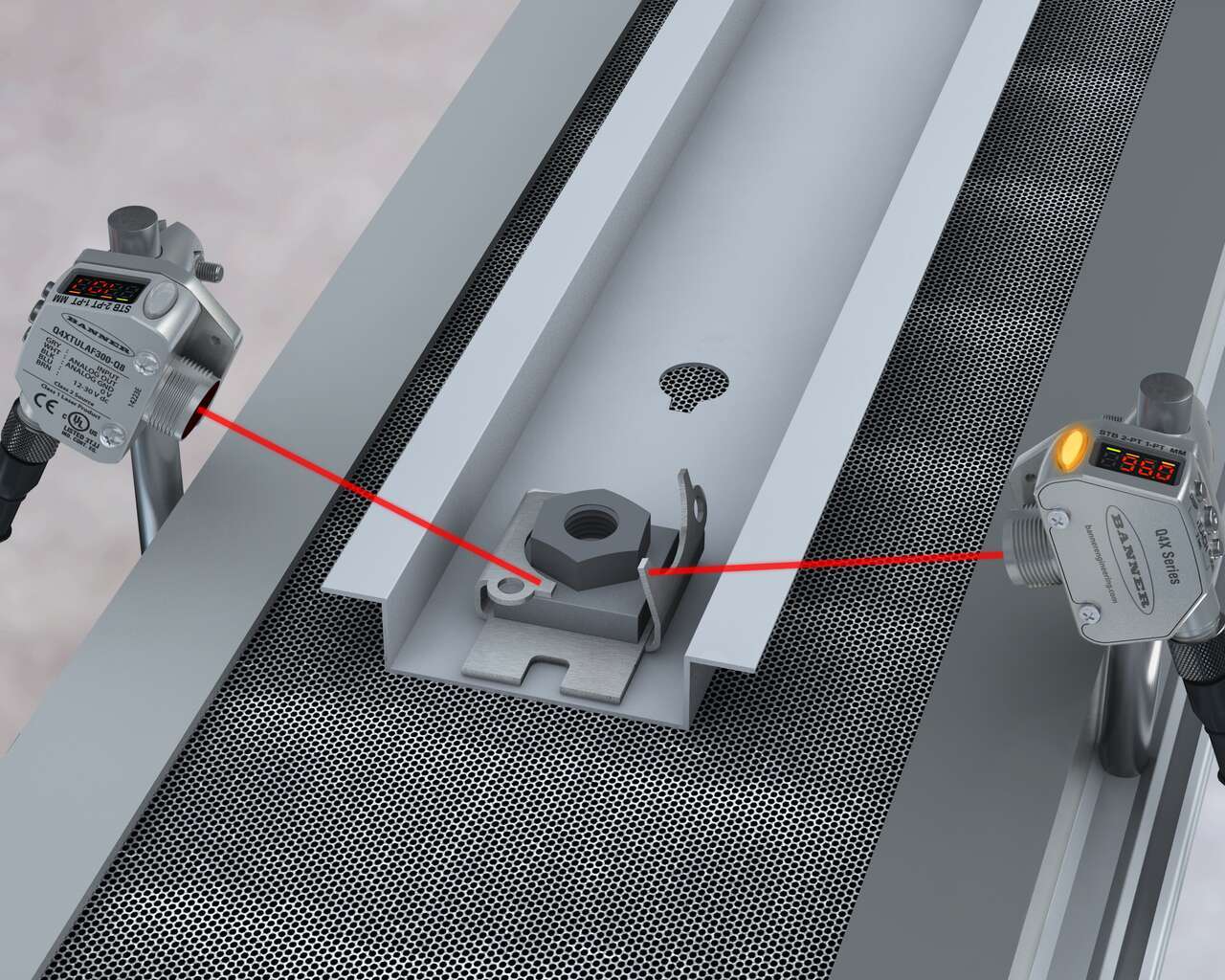
Nombre de la Serie Q3X | Alcance Opuesto (m) –- | Alcance Retrorreflectivo No Polarizado (m) — | Alcance Retrorreflectivo Polarizado (m) — | Alcance Retrorreflectivo Polarizado Láser (m) — | Alcance Difuso 300 (mm) | Alcance de Campo Fijo 200 (mm) | Alcance de Campo Ajustable (mm) –- | Tipo de Emisor Láser | Material de la Carcasa Metal | Clasificación IP IP67, IP68, IP69K | Tiempo de Respuesta (μs) 250 | Temperatura de Funcionamiento de -10 a +50 °C | IO-Link 🚫 NO | Detección de Objetos Claros 🚫 NO |
Serie Imagen  |
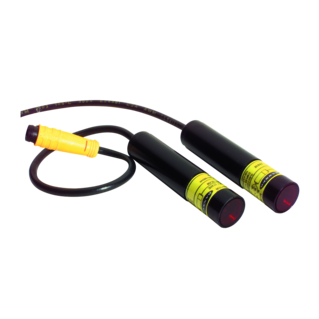
Nombre de la Serie Q2X | Alcance Opuesto 3 (m) | Alcance Retrorreflectivo No Polarizado (m) — | Alcance Retrorreflectante Polarizado 3.3 (m) | Alcance Retrorreflectivo Polarizado Láser (m) — | Alcance Difuso (mm) –- | Alcance de Campo Fijo 50 (mm) | Alcance de Campo Ajustable 3000 (mm) | Tipo de Emisor LED y Láser | Material de la Carcasa Plástico | Clasificación IP IP67 | Tiempo de Respuesta (μs) 600-100,000 | Temperatura de Funcionamiento de -25 a +50 °C | IO-Link ✅ SÍ | Detección de Objetos Claros ✅ SÍ |








































Aplicaciones Fotoeléctricas
-
Streamline Labeling Process with a Fixed-Field Sensor
-
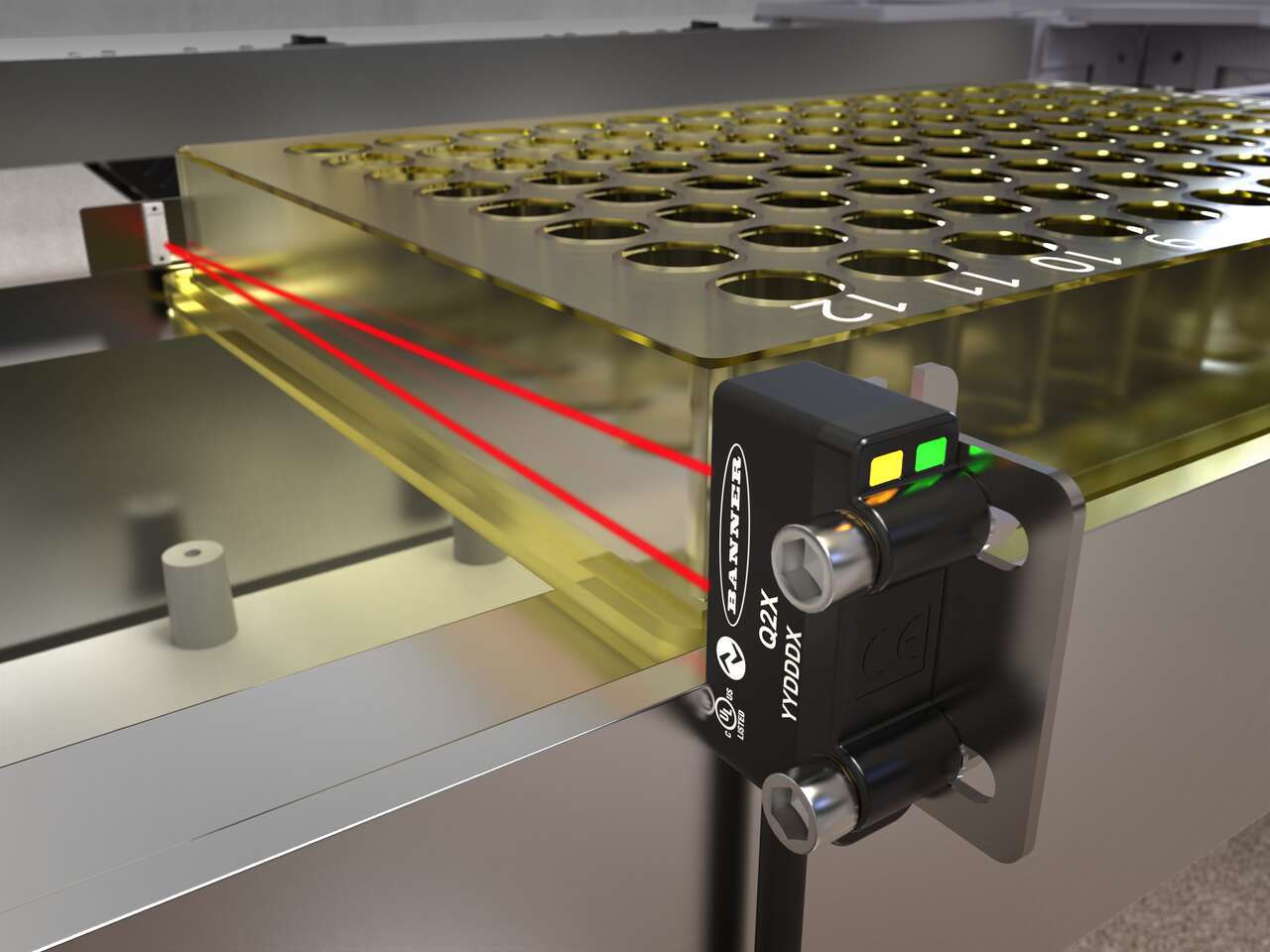
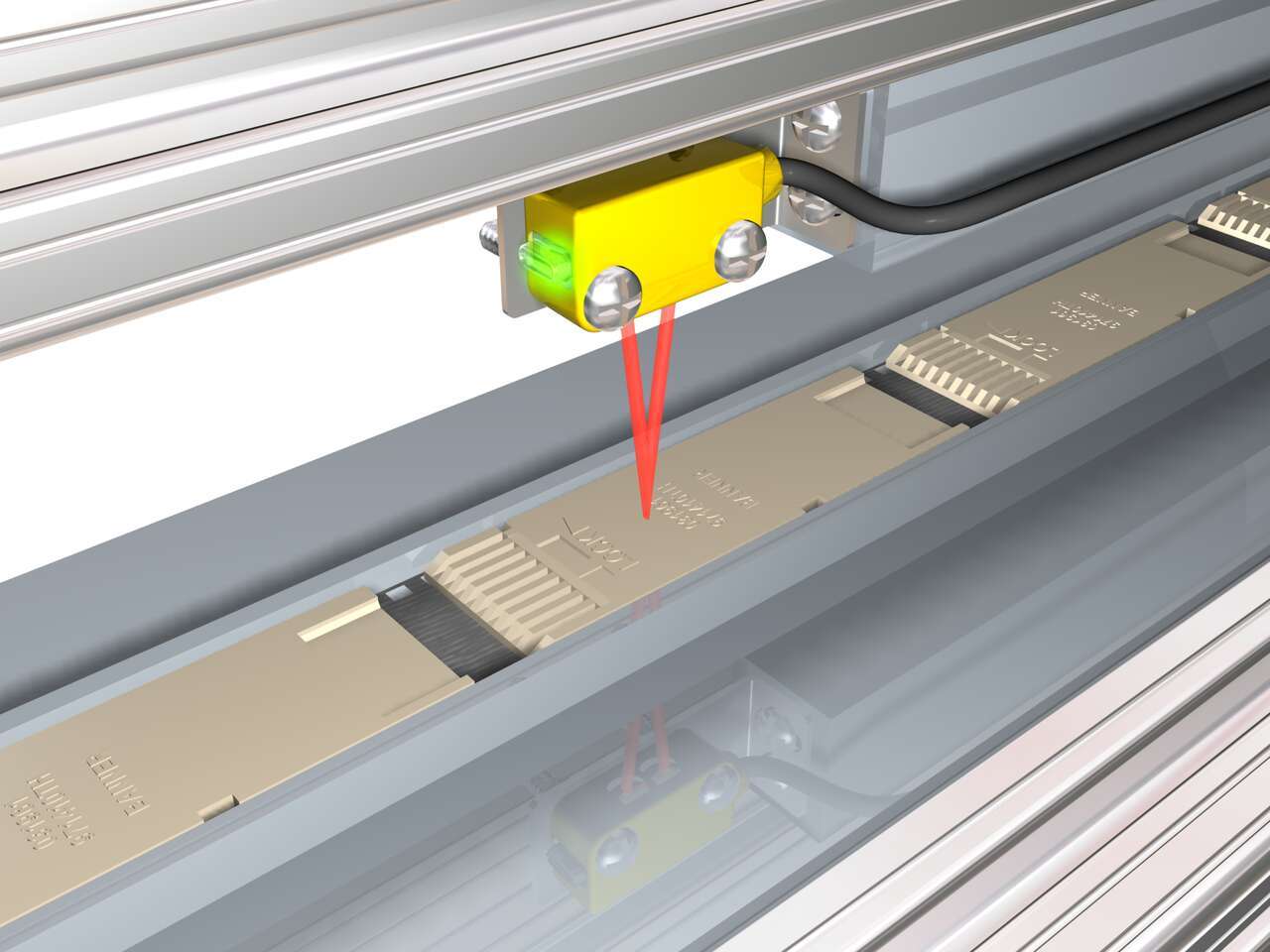
Accurate Positioning in Medical & Scientific Laboratories
-
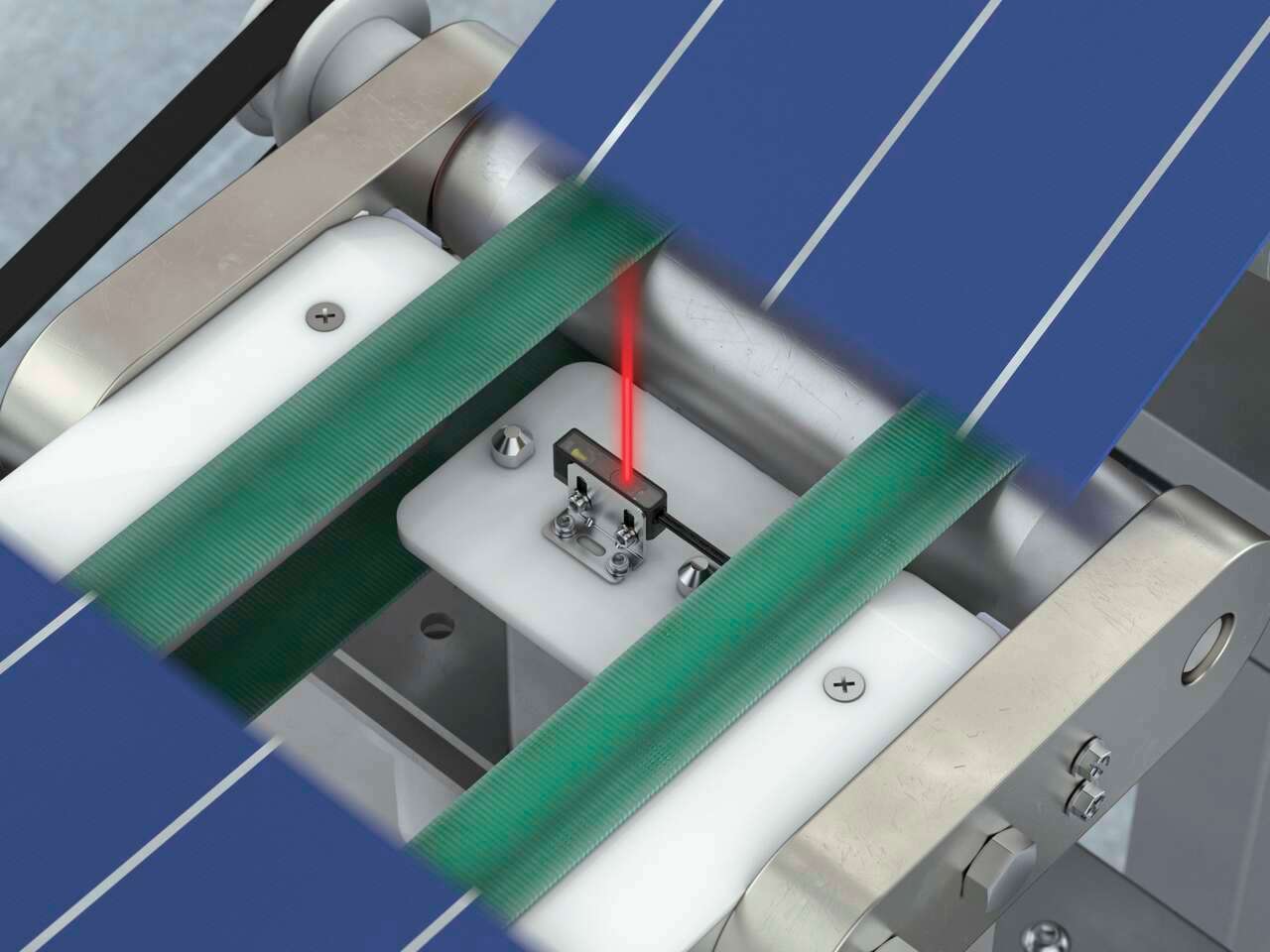
Dark Wafer Presence Detection
-

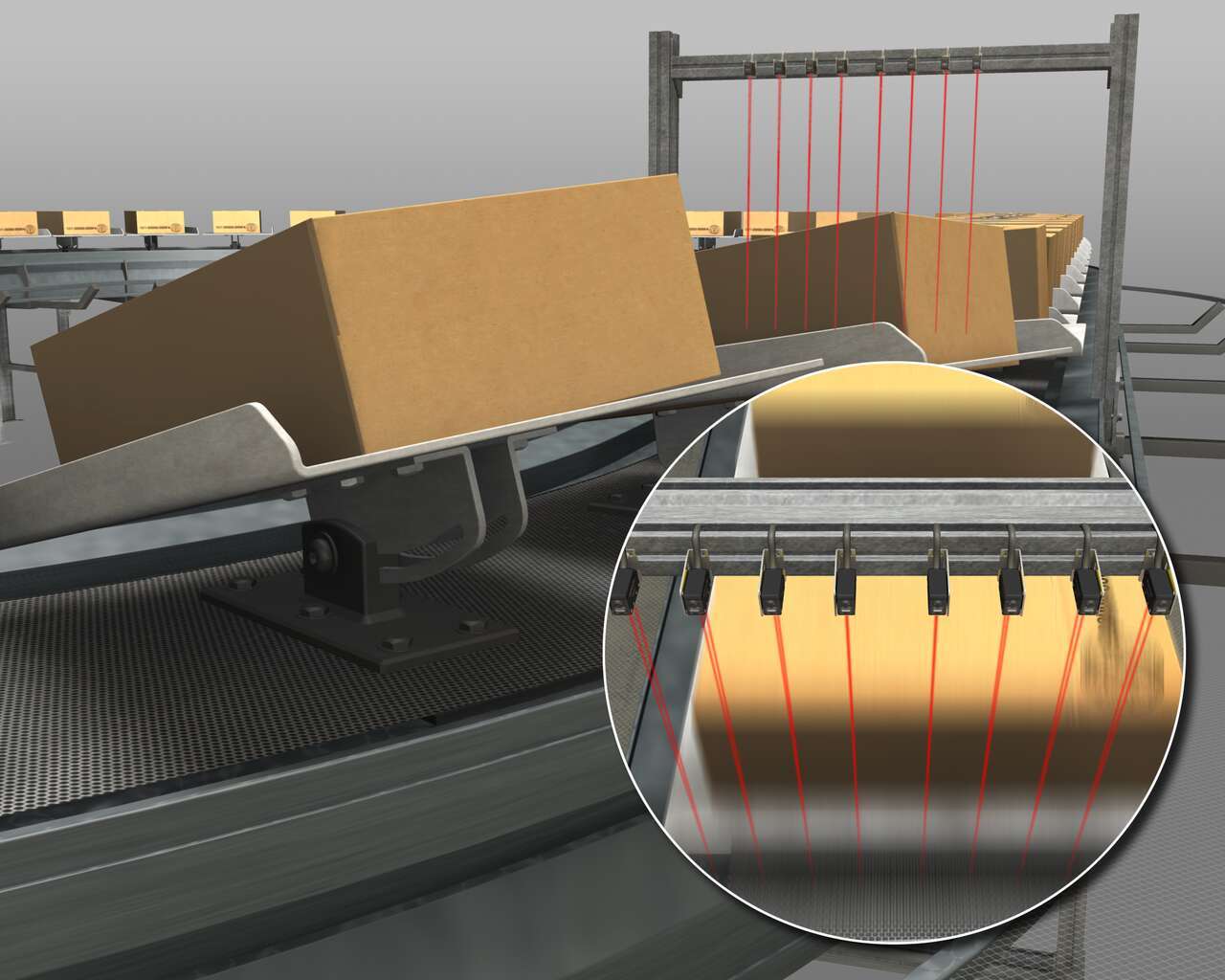
Preventing Jams in Airport Baggage Retrieval Systems
-

Status Indication on Airport Conveyor
-

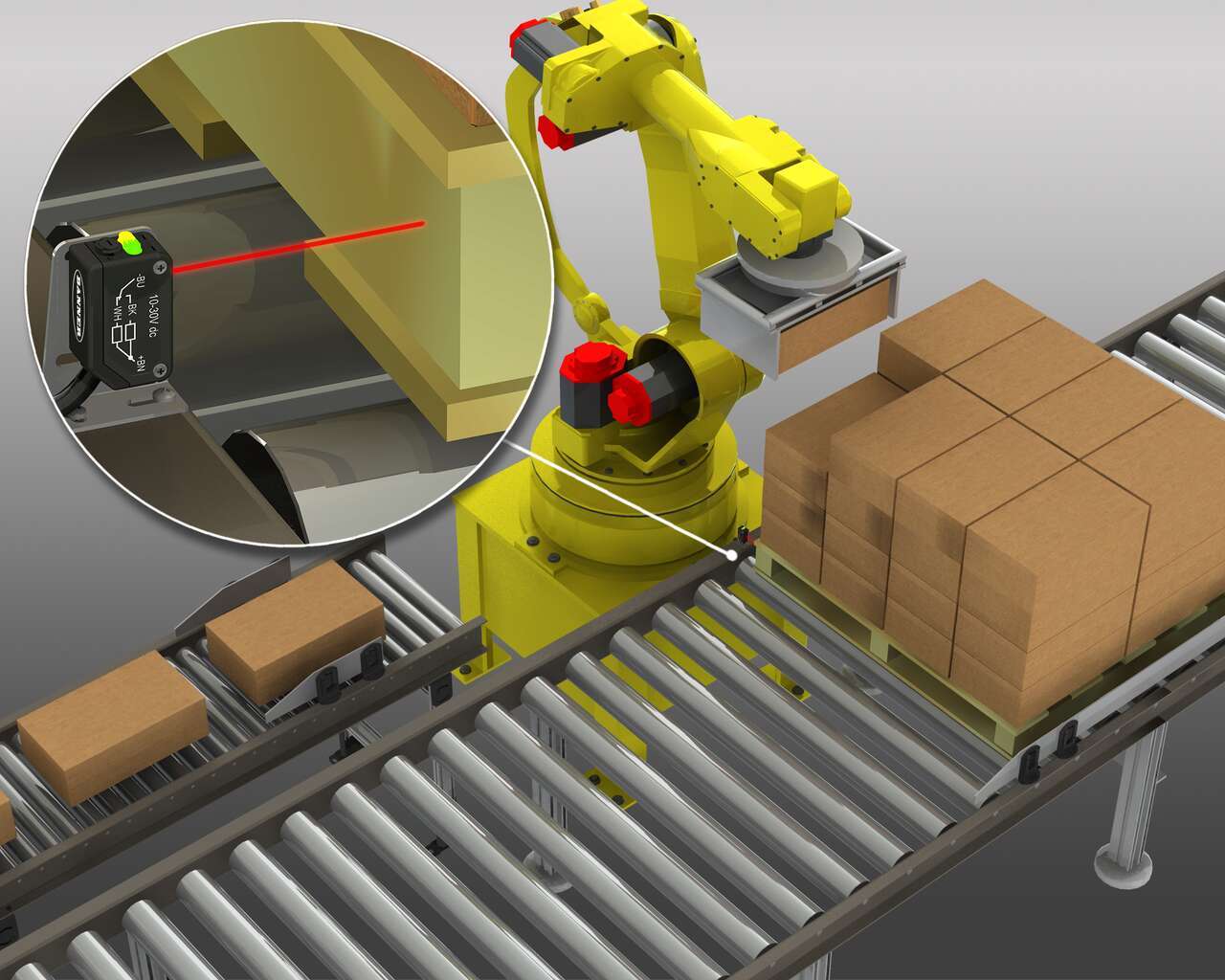
Positioning Pallets for Unloading by Robot Arms
-

Illuminated Forklift Guidance
-

Jam Detection on a Conveyor with Only AC Power
-
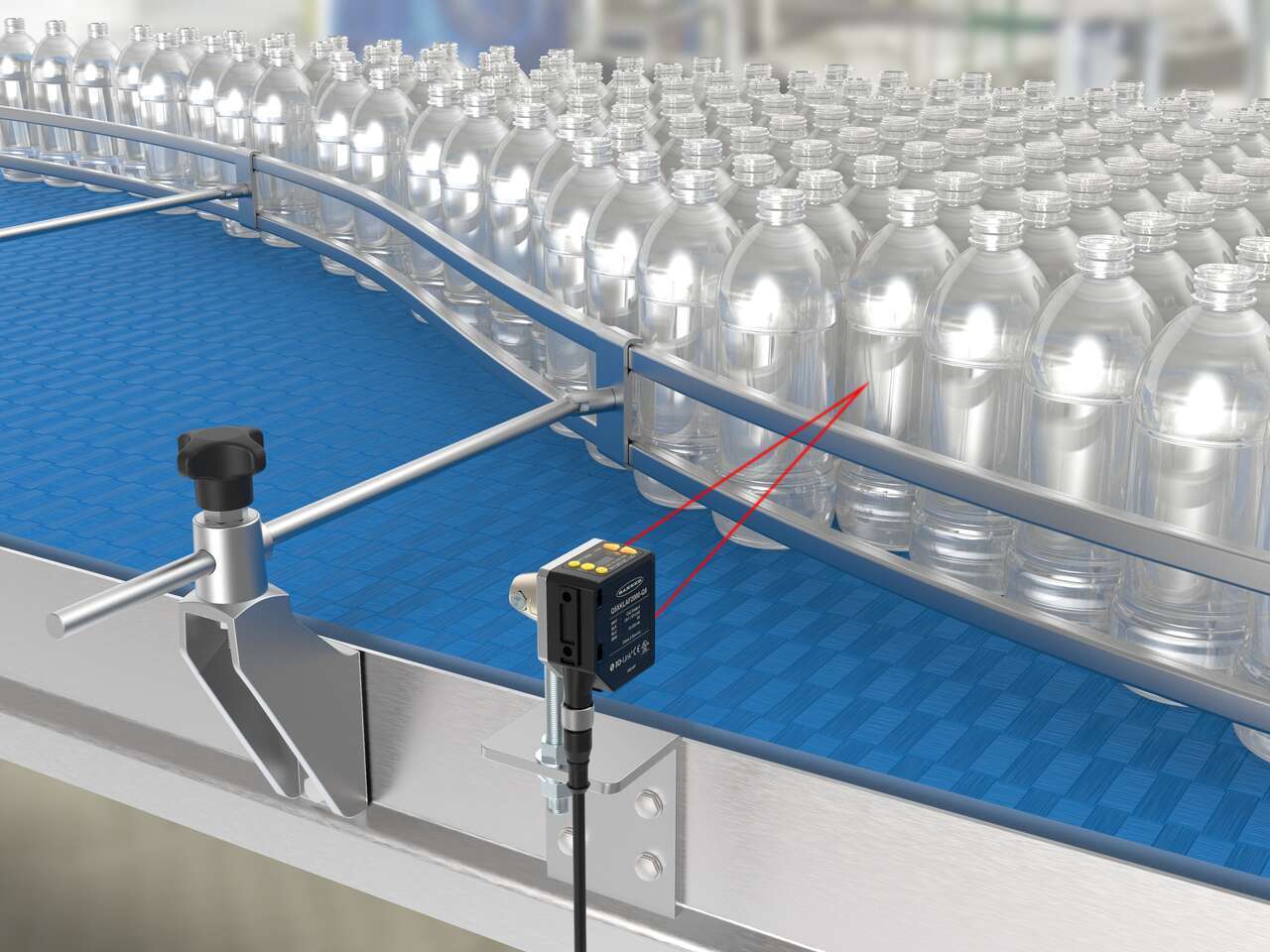
![Detección consistente de botellas de plástico transparentes a lo largo de una cinta transportadora [Caso de Éxito]](/content/dam/banner-engineering/photography/general---stock-photography/stock_photo_new/bigstock-Bottle-Industry-30664220.jpg/jcr:content/renditions/cq5dam.web.1280.1280.jpeg)
Consistent Detection of Transparent Plastic Bottles Along a Conveyor Machine
-
![Operator Guidance Solution [Success Story]](/content/dam/banner-engineering/3d-renders/application-notes/wcc-migration/2013/PVD_QS30LE_OTB_K50L_Bin-Pick-for-Transmission-Plate.psd/jcr:content/renditions/cq5dam.web.1280.1280.jpeg)
Operator Guidance Solution
-
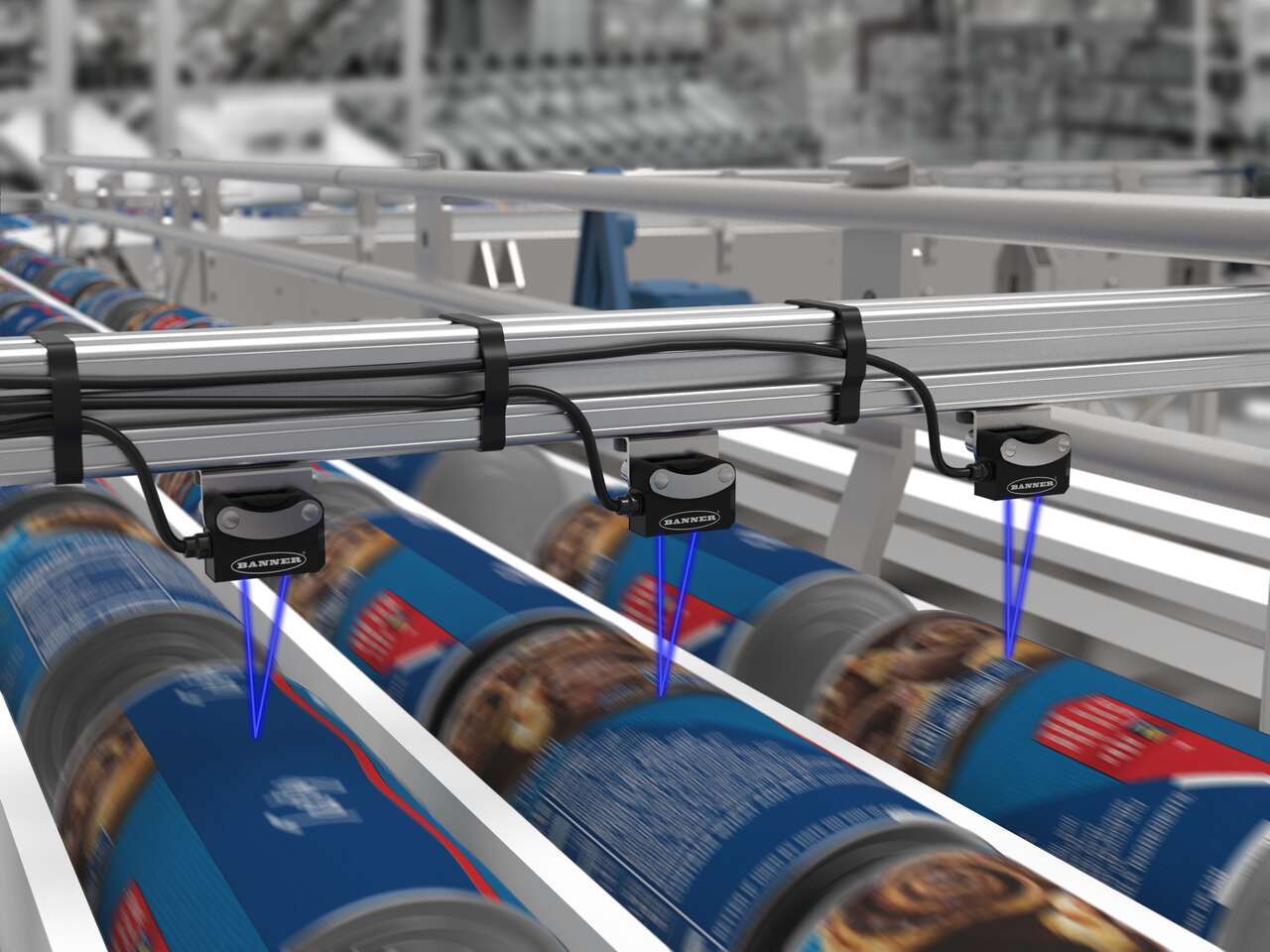
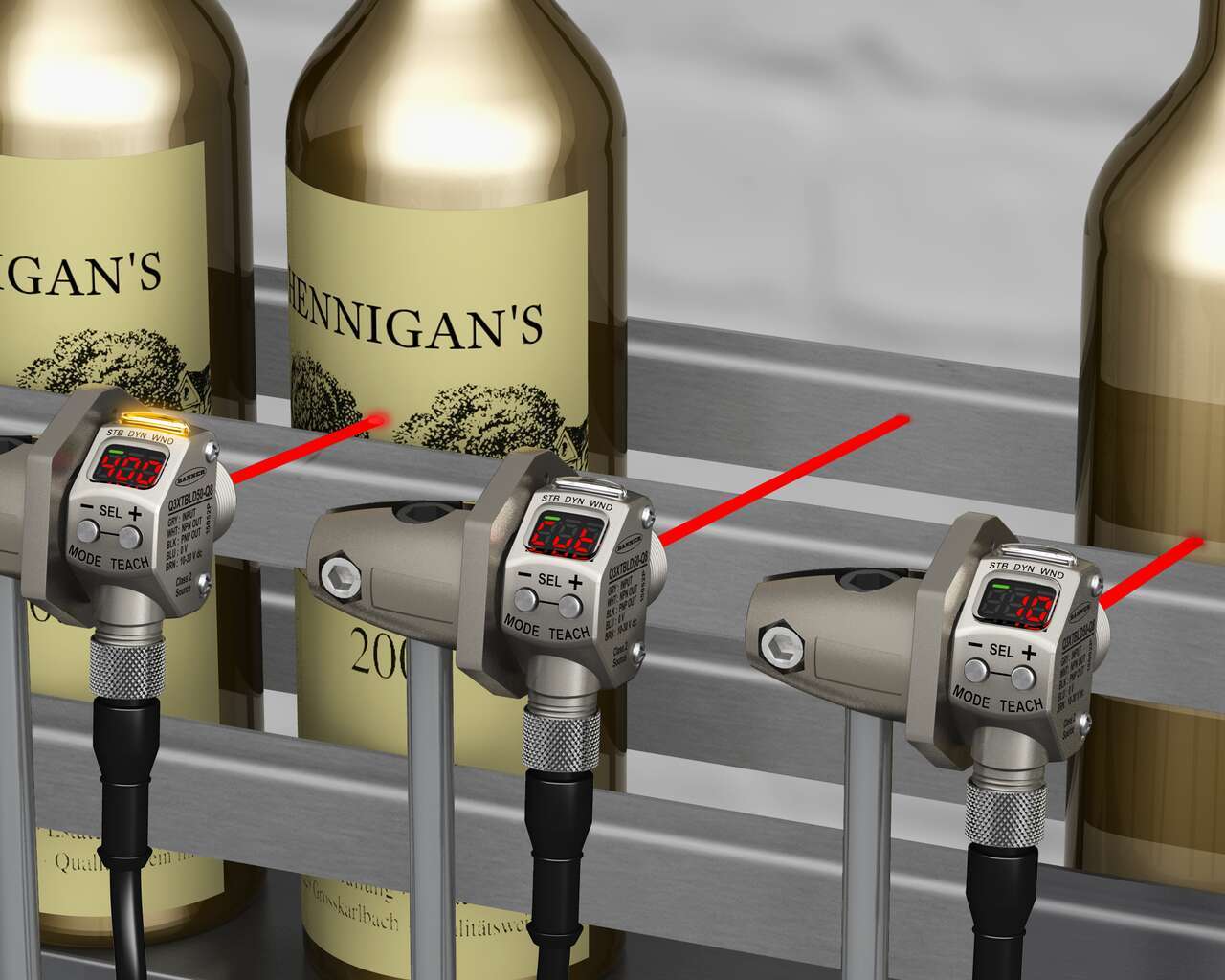
![Sensor de LED Azul Detecta Botellas Color Ámbar [Caso de Éxito]](/content/dam/banner-engineering/3d-renders/application-notes/wcc-migration/2010/QS18LV-Solid-Dose-Pkng---Perscription-Vial-Detect.psd/jcr:content/renditions/cq5dam.web.1280.1280.jpeg)
Sensor de LED Azul Detecta Botellas Color Ámbar [Caso de Éxito]
-
![Etiquetado Termo Encogido a Altas Velocidades [Caso de Éxito]](/content/dam/banner-engineering/3d-renders/application-notes/wcc-migration/2013/QS18VN6LLPQ5-Shrink-Sleeve-Bottle-Labeling.psd/jcr:content/renditions/cq5dam.web.1280.1280.jpeg)
Etiquetado Termo Encogido a Altas Velocidades [Caso de Éxito]
-
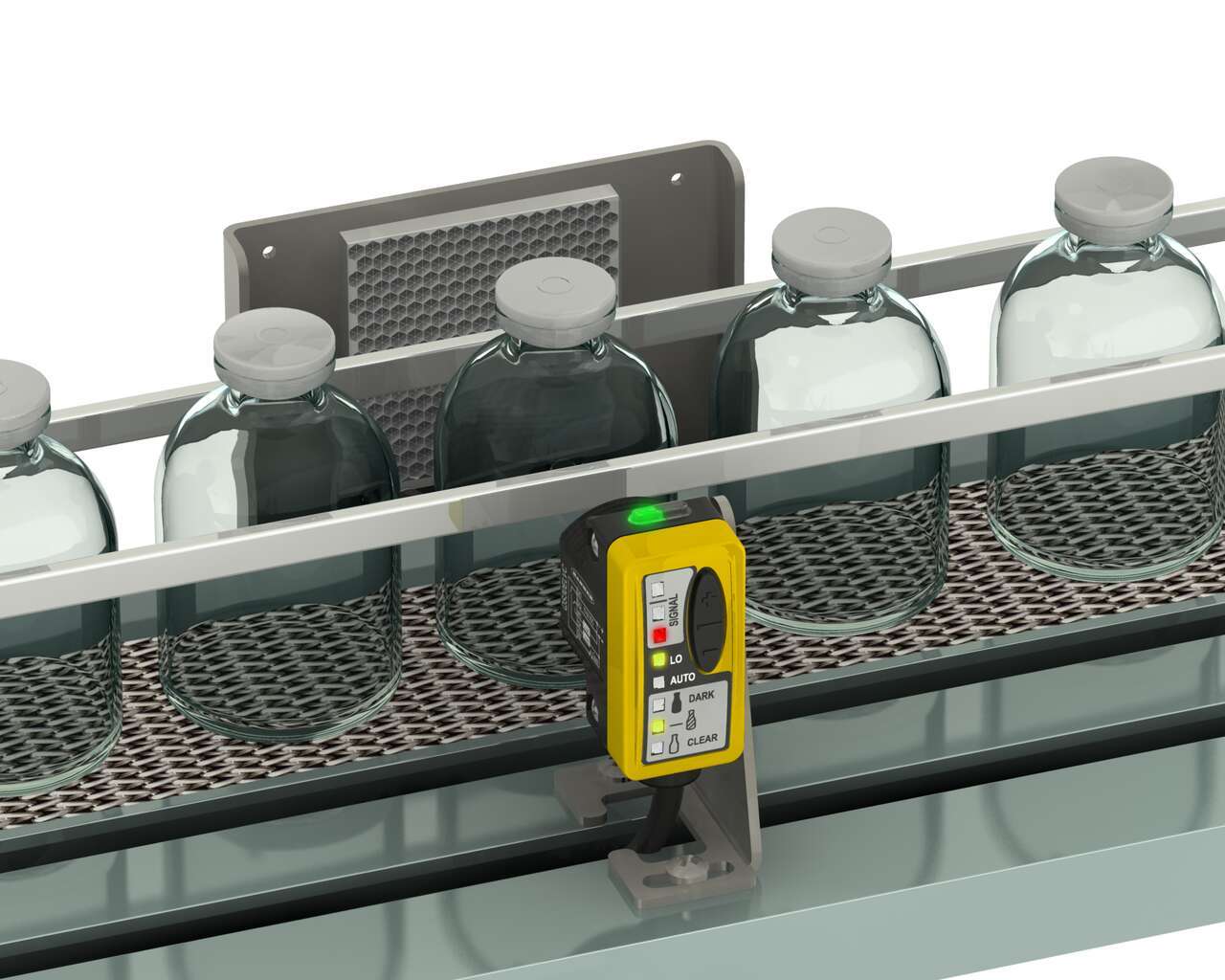
Accurate Counting of Transparent Pharmaceutical Bottles
-

Altura de Pila de Cartón
-
Medición de Nivel
-
Detección de Objetos a Largo Alcance
-

Monitoreo de Niveles de Bandeja de Plástico en una Máquina de Denester
-
Contando Tarjetas de Memoria
-

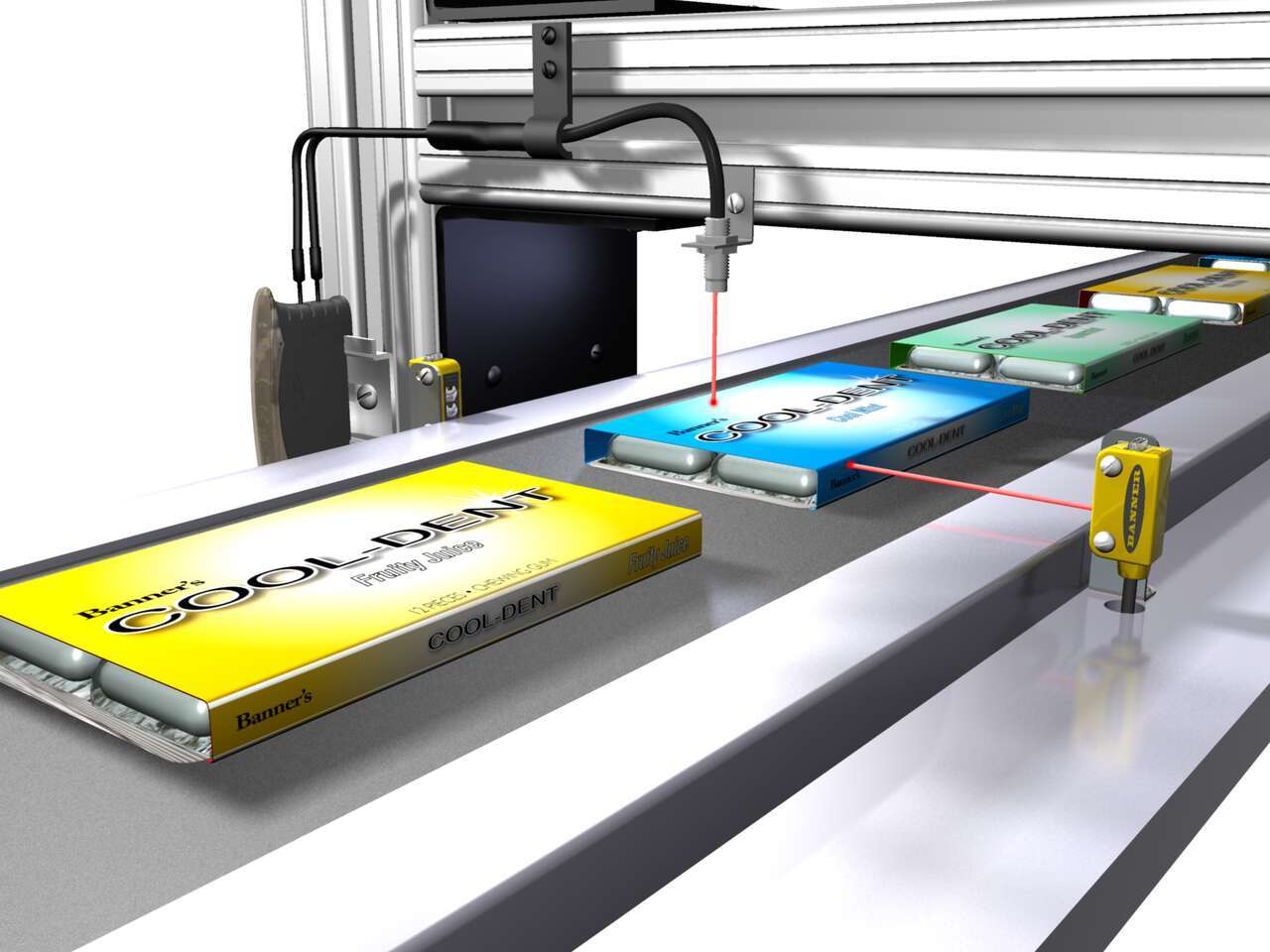
Detección de Cartón de Jugo
-
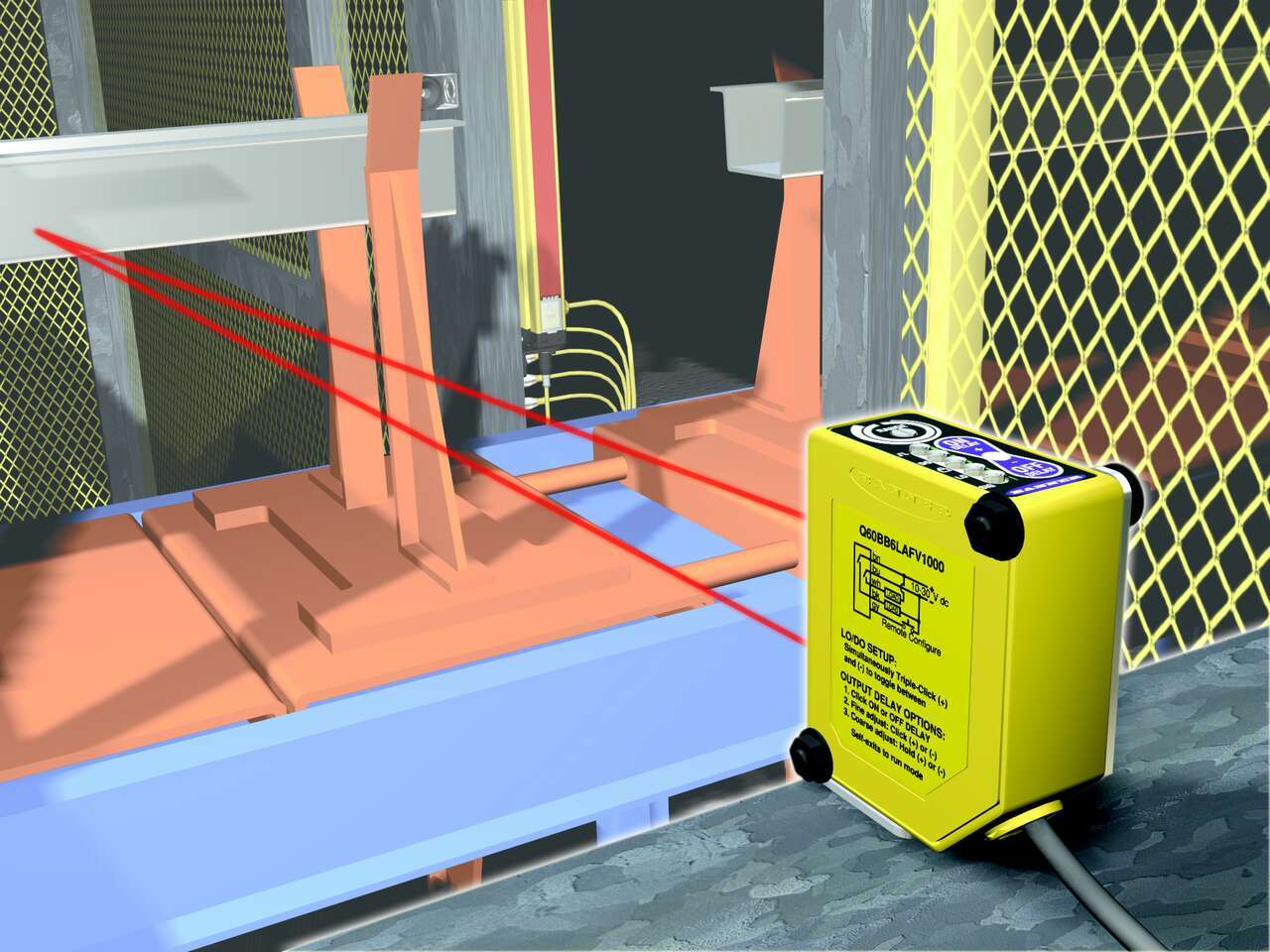
Load Station Pallet Detection
-

Monitoring Clear Film in a Tray Sealer
-

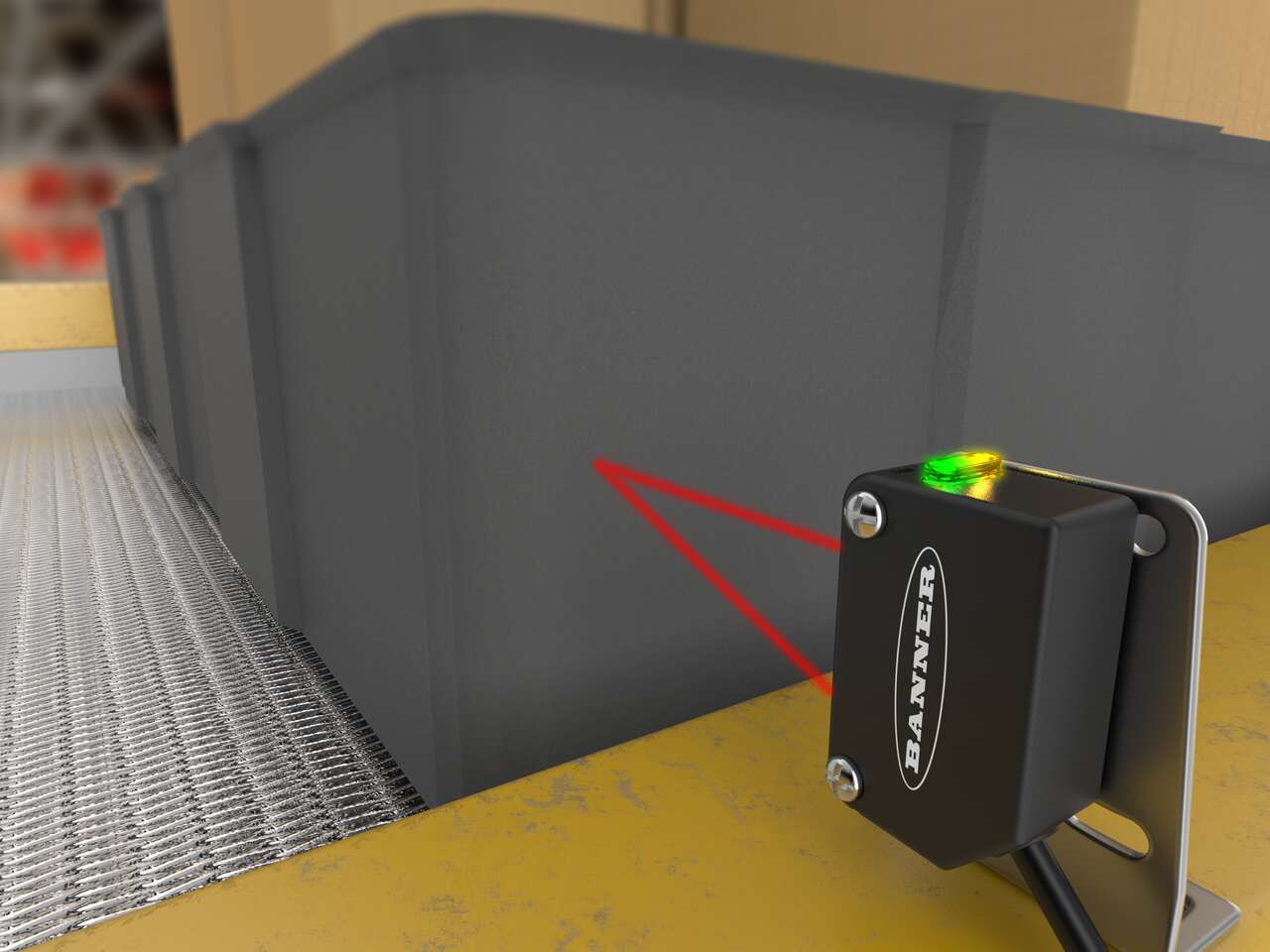
Evitar Colisión de Paquetes
-
Posicionamiento del Transportador de Carga
-
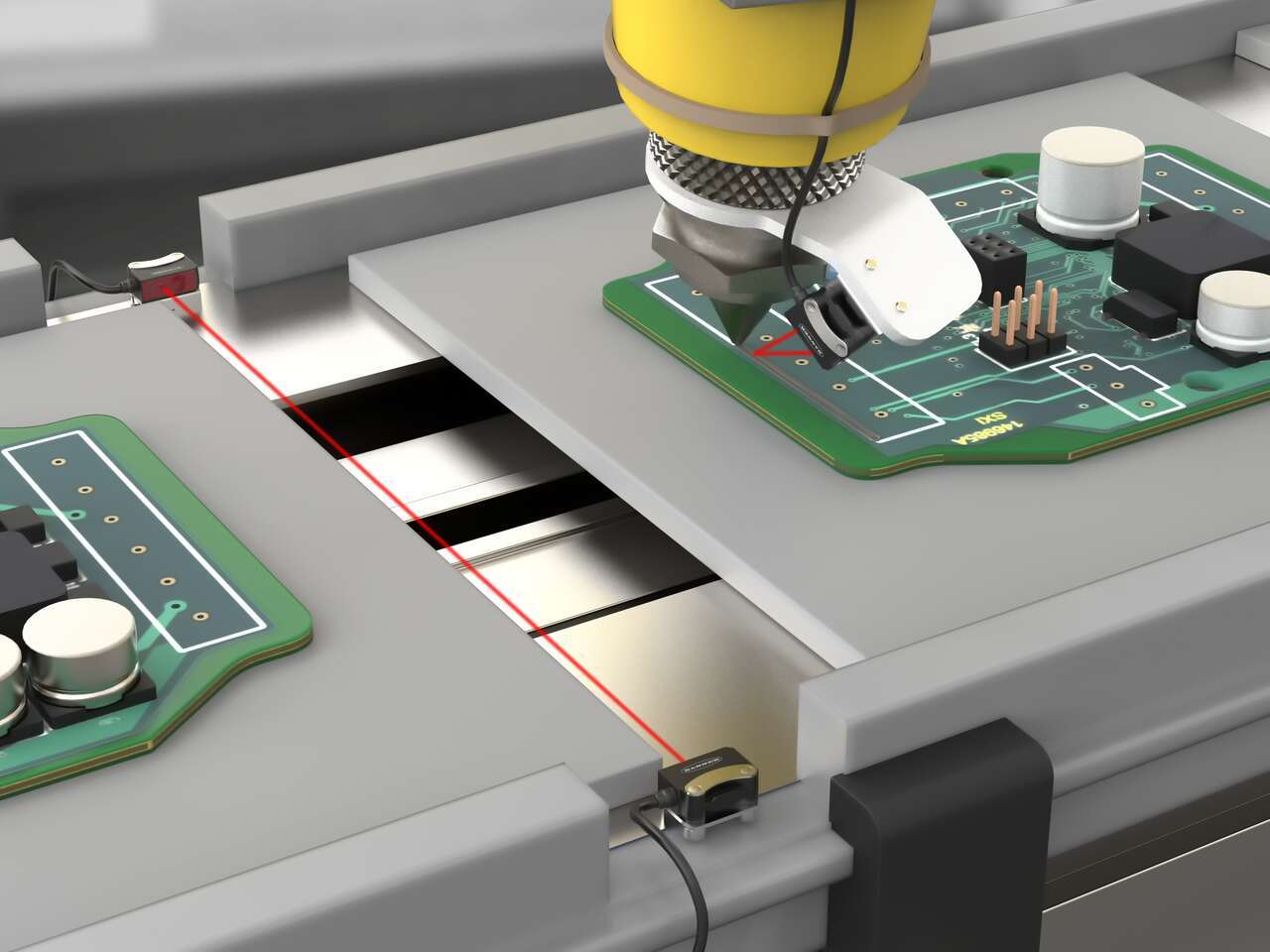
Detección de Adhesivo de PCB Durante el Proceso de Ensamblaje
-
Detección de O-Ring Negro
-

Inspección de Tapas en Áreas Confinadas
-
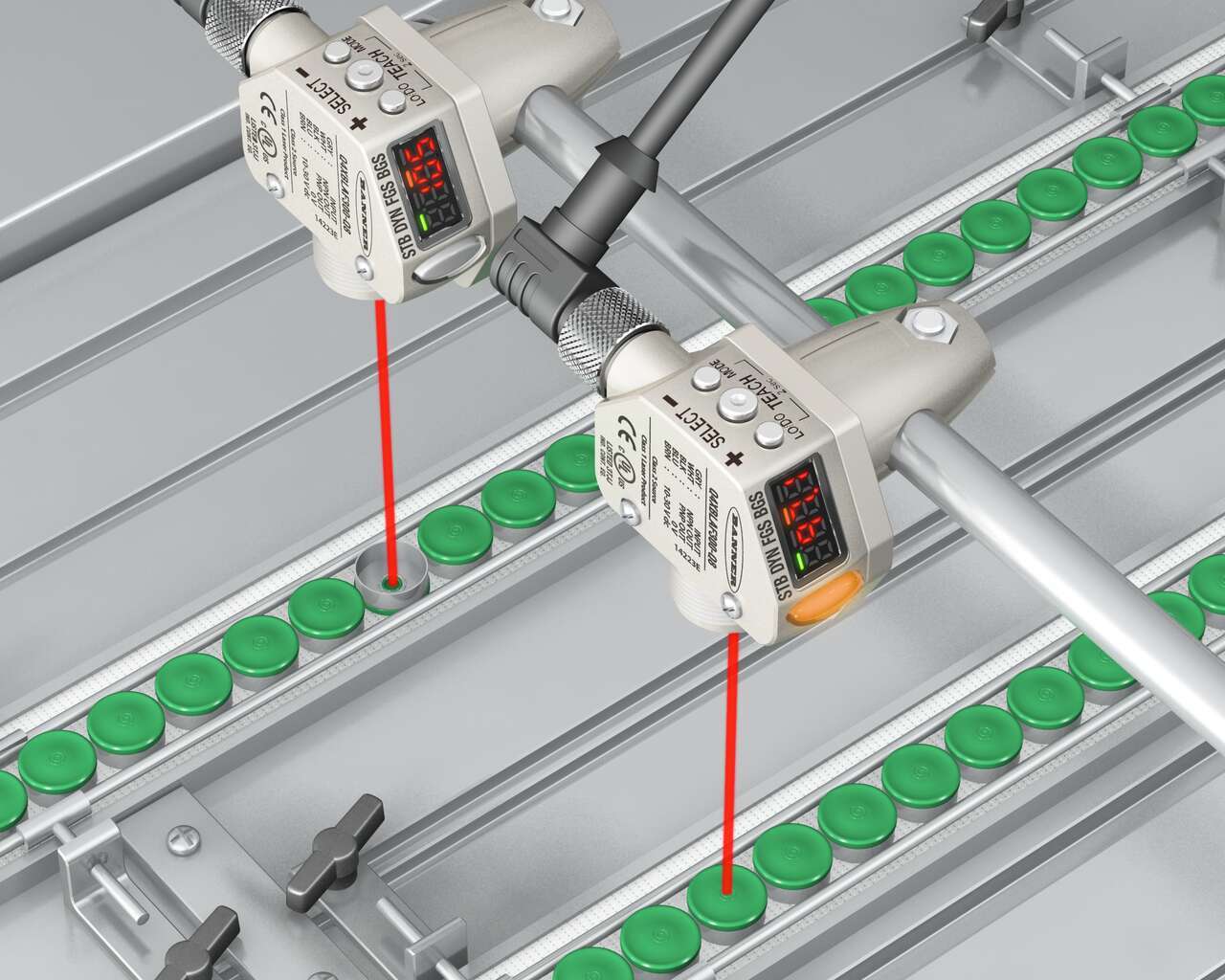
Verificación de Orientación de Tapa
-
Detección de Partes Negras en el Panel Negro de una Puerta
-
Detección de Roles de Desayuno Refrigerados en un Transportador de Varios Líneas
-
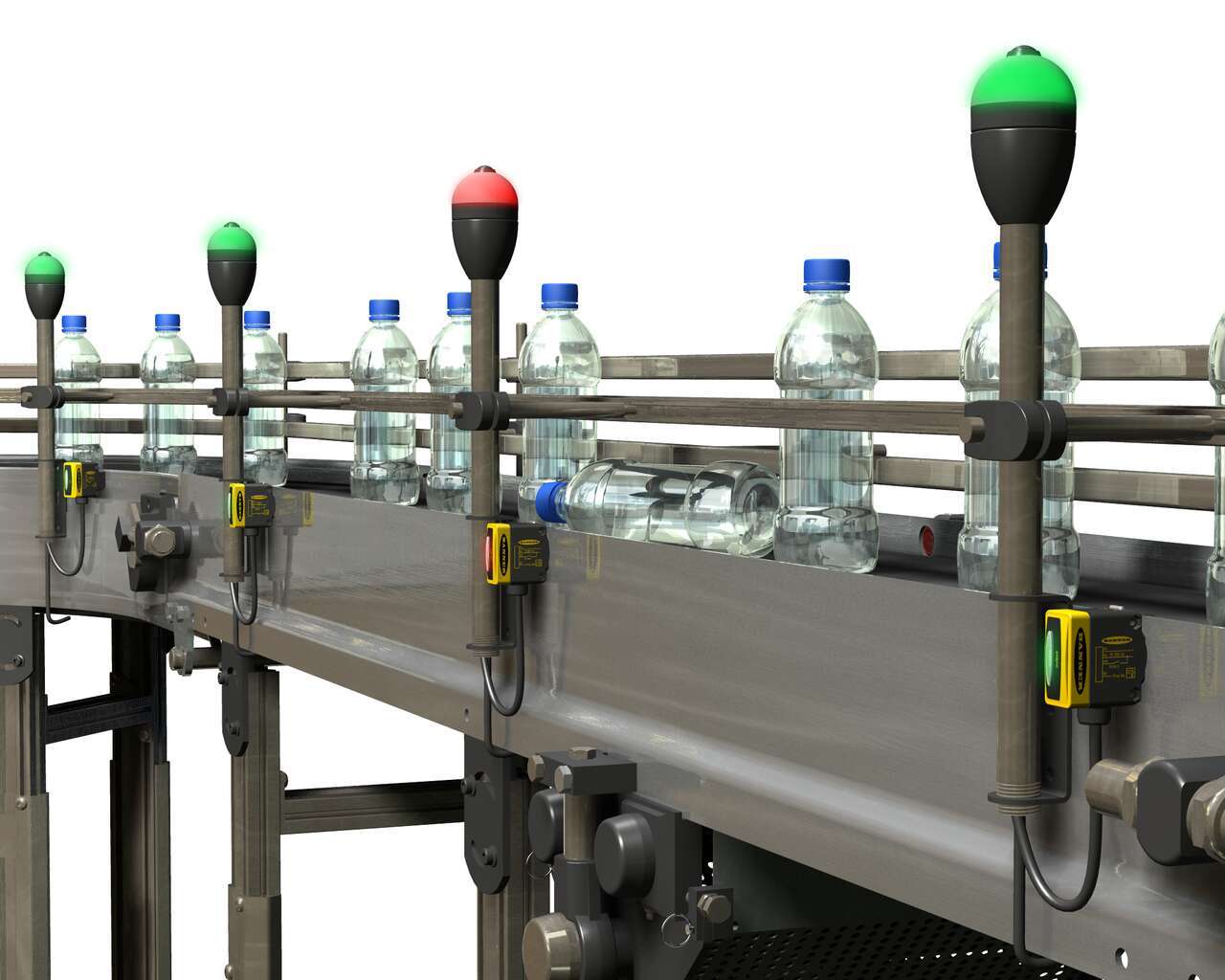
Detectar e Indicar la Presencia de una Botella Ladeada
-

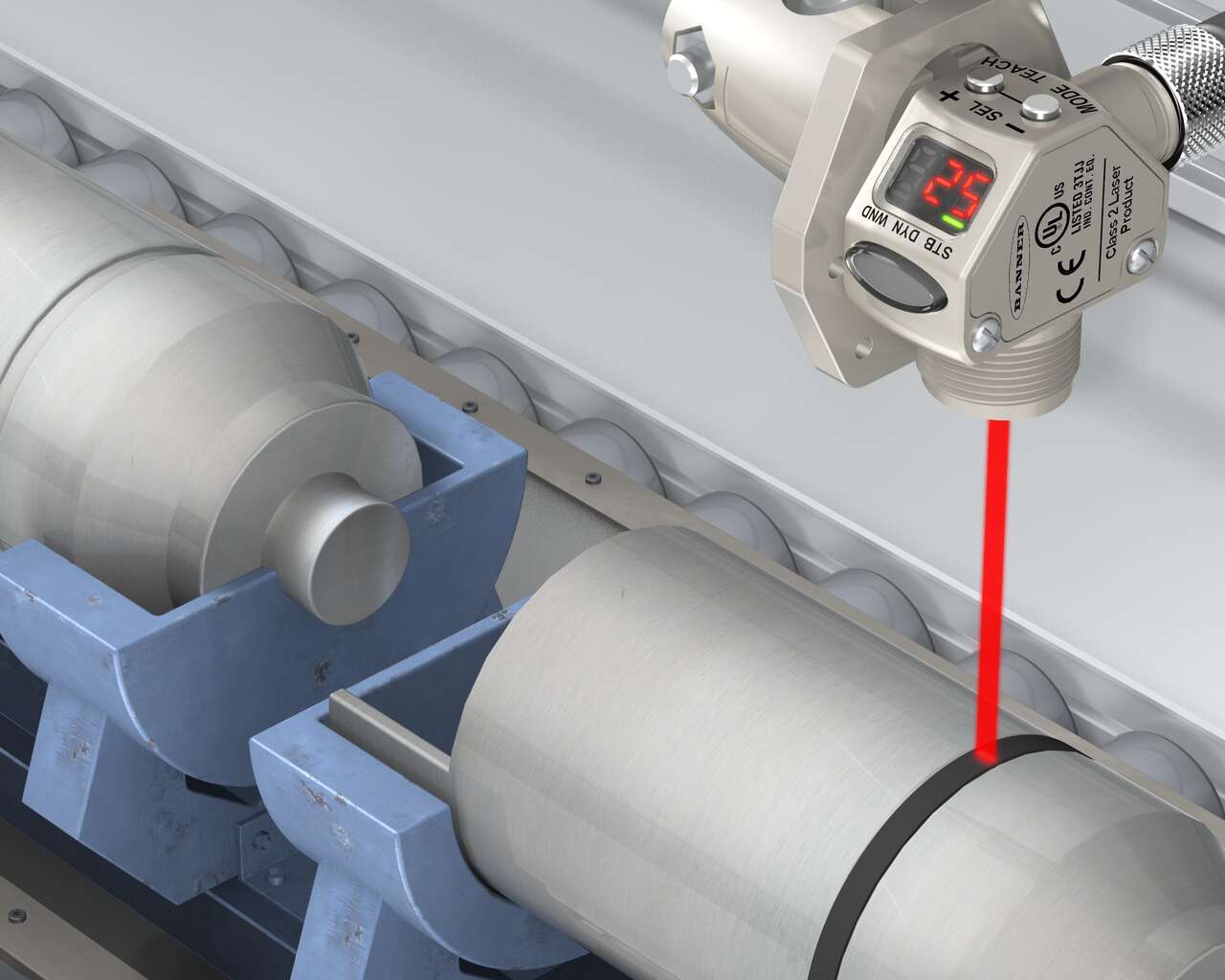
Conteo de Anillos Reflectantes
-
In-Line Accumulation on Single Filer
-
Detección de Líquidos Transparentes en Envases Transparentes
-

Indicación de Atasco en un Tobogán de Salida
-
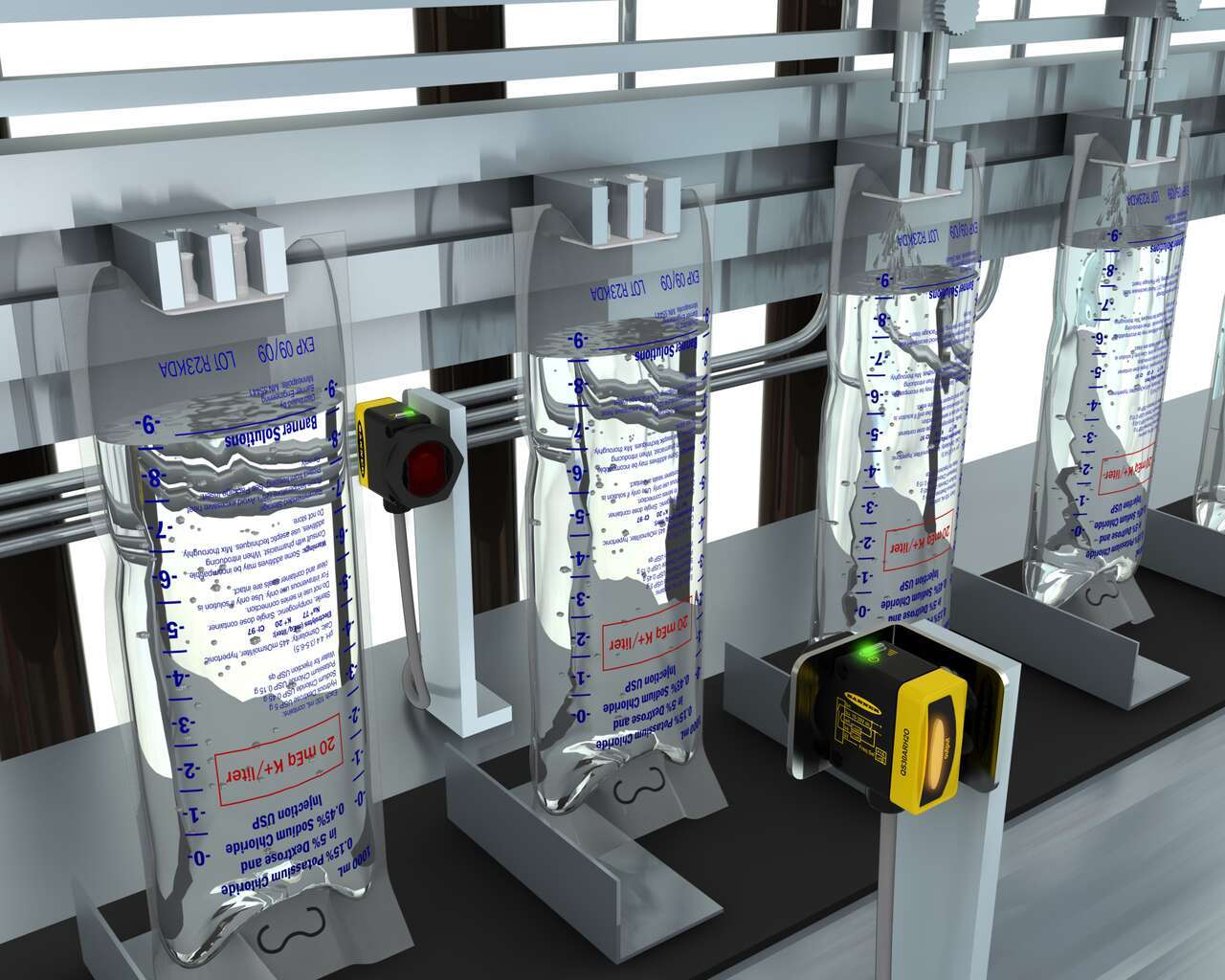
Detección de Nivel de Llenado de Botella
-
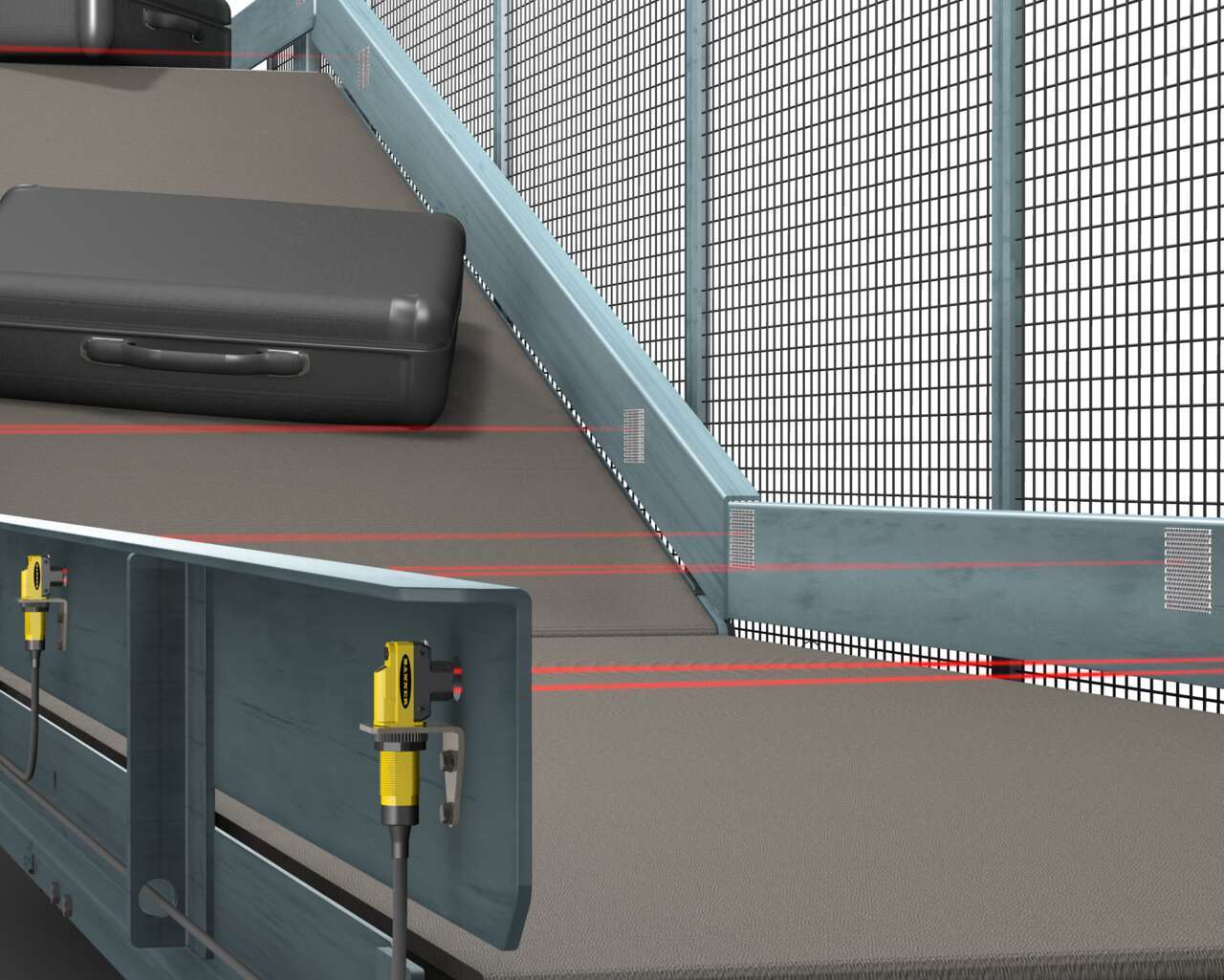
Manejo de Equipaje
-

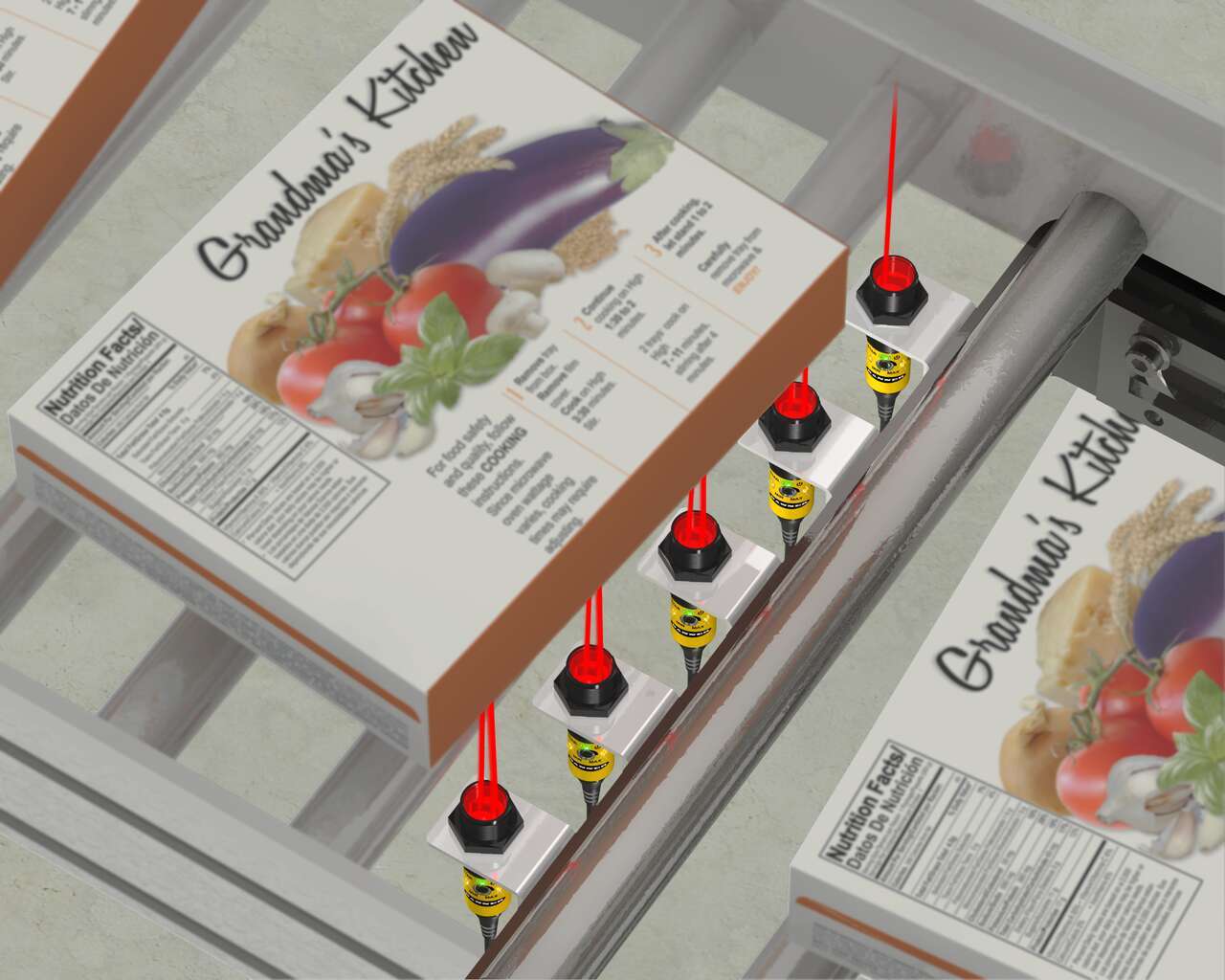
Activación de una Impresora de Fecha/Lote en Cajas de Cartón
-
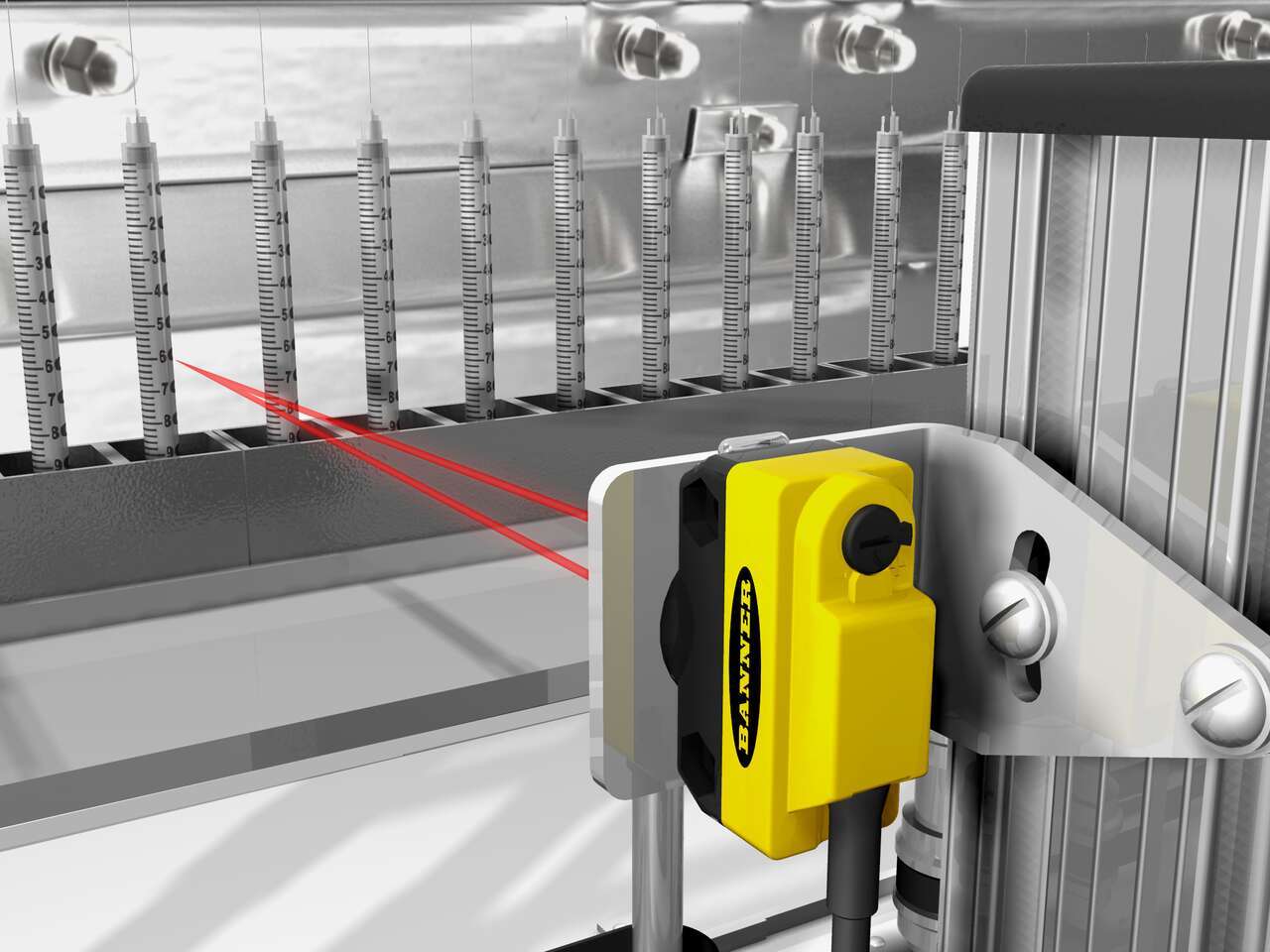
Conteo de Jeringas Utilizando Supresión de Fondo
-
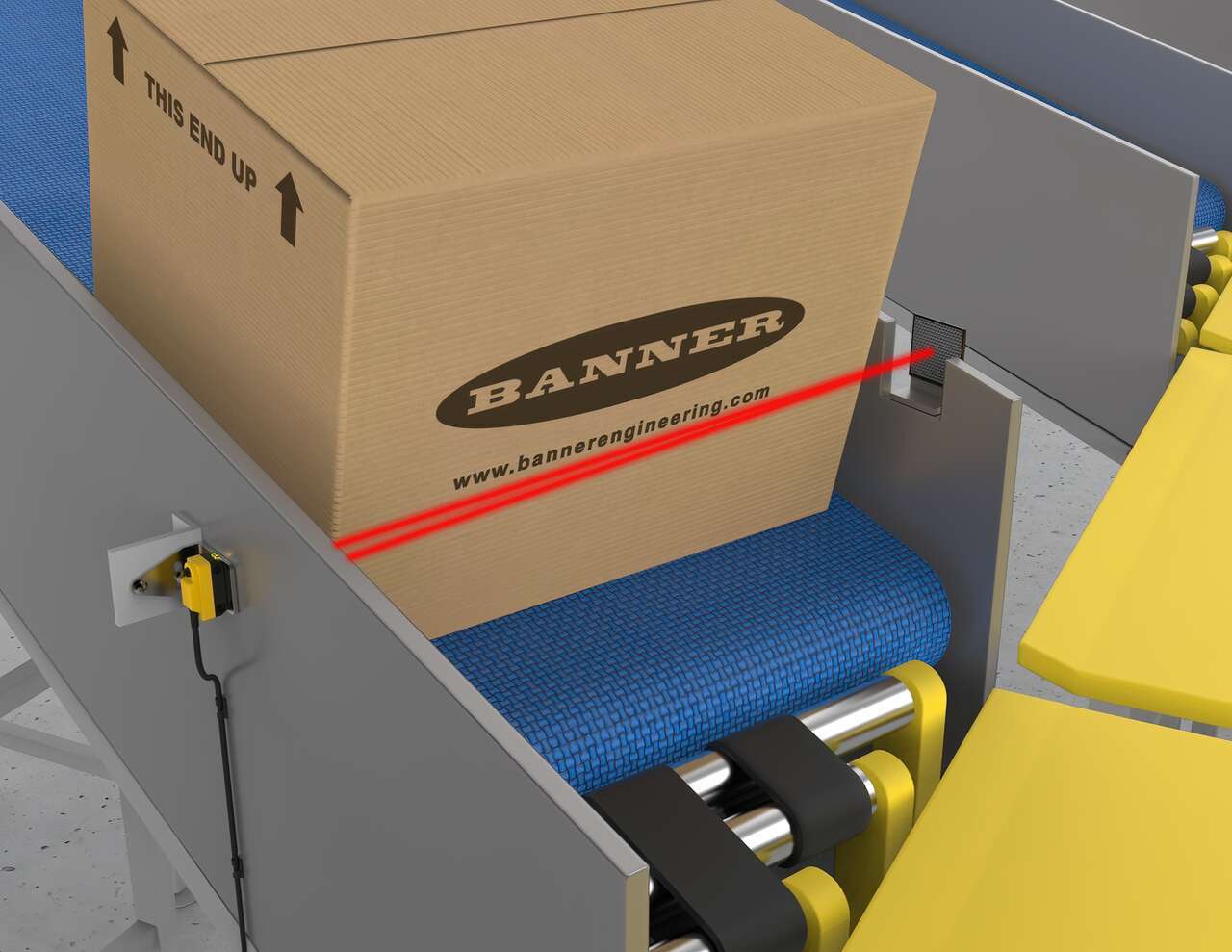
Detección de Paquetes de Diferente Tamaño en un Transportador
-

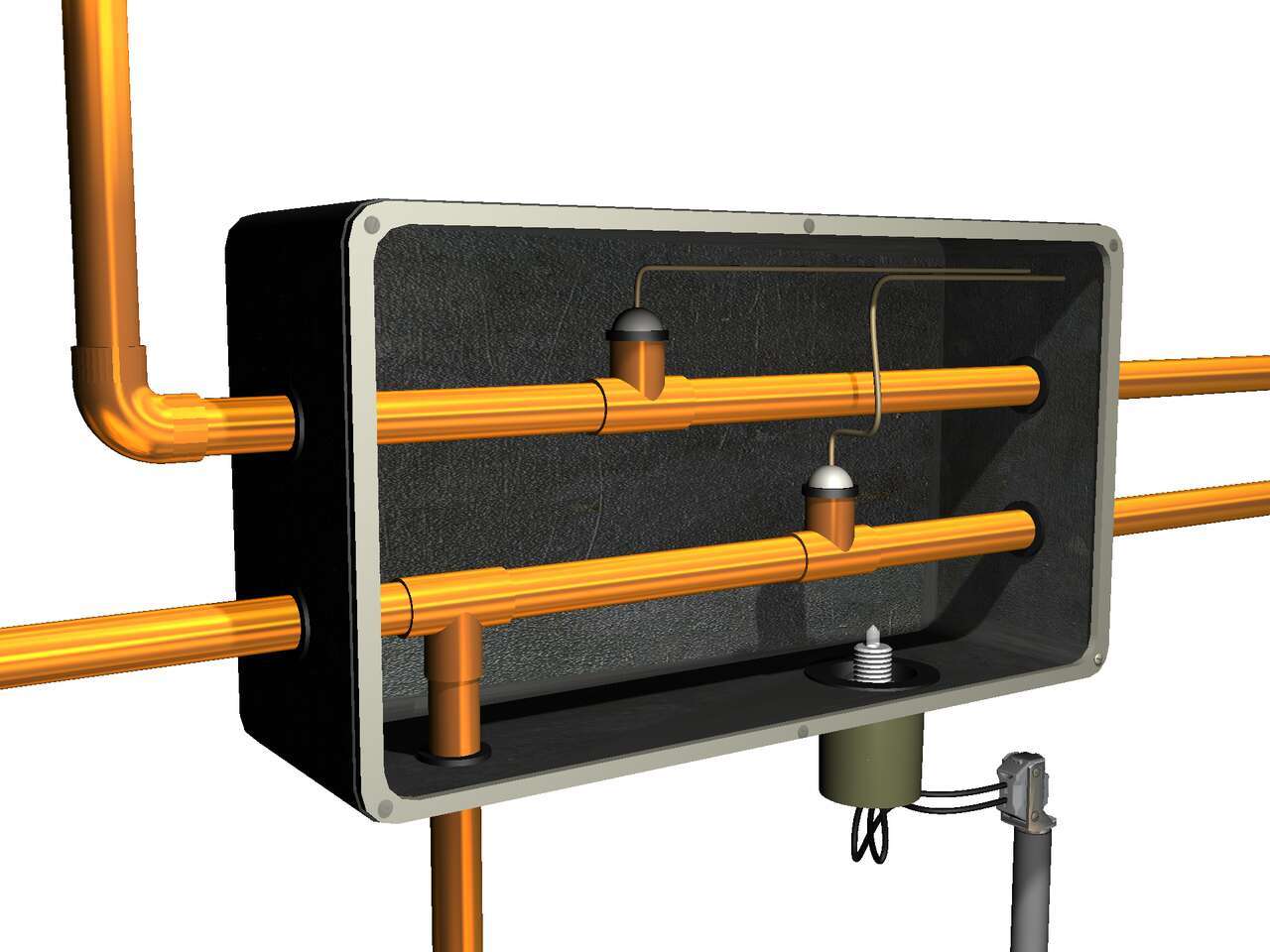
Detección de Objetos en un Transportador de AC
-

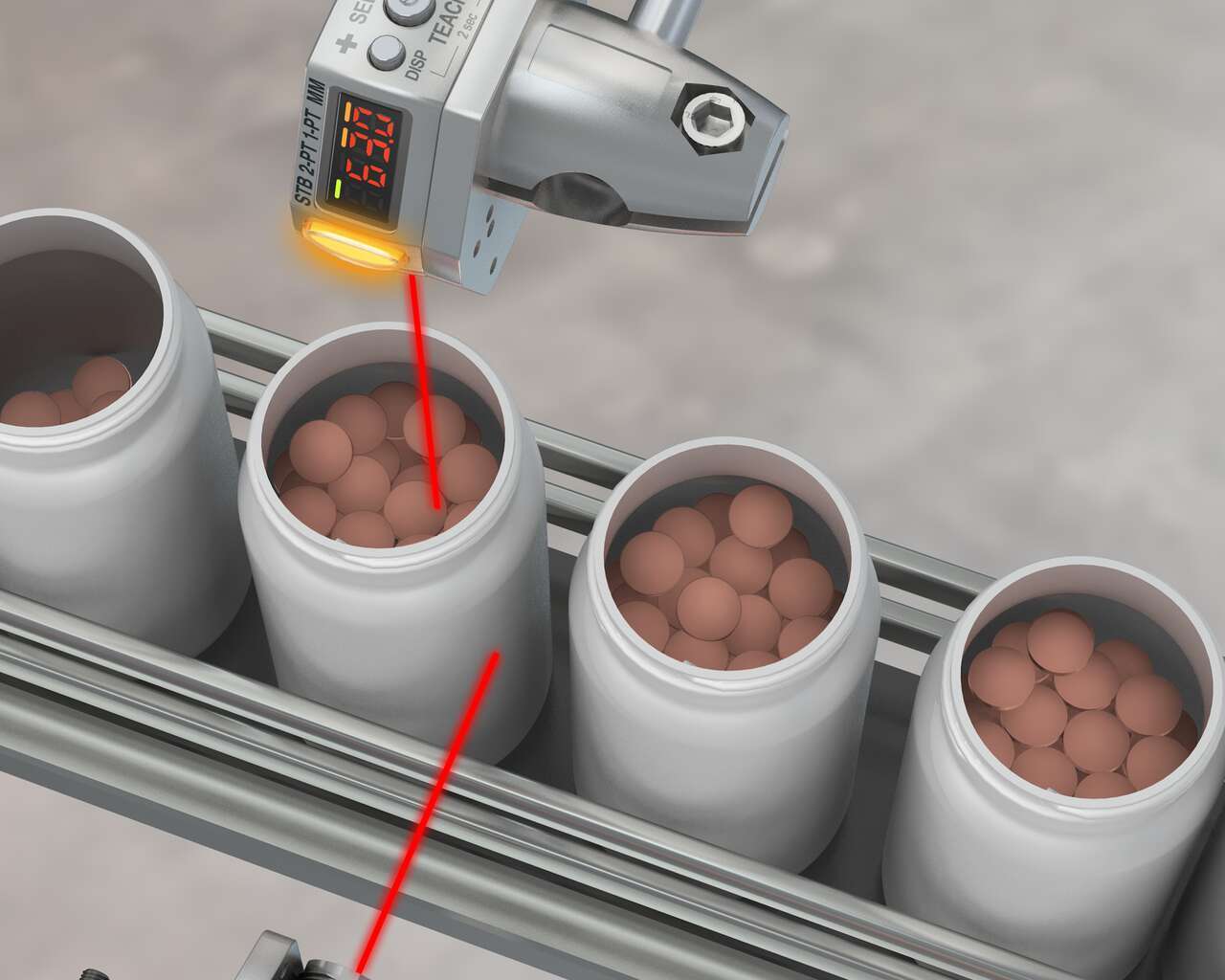
Detección de Llenado en Envase de Medicina
-
Detección de Altura de Apilado de Piezas Metálicas
-

Inspección de Paquetes Utilizando un Sensor Láser Difuso
-
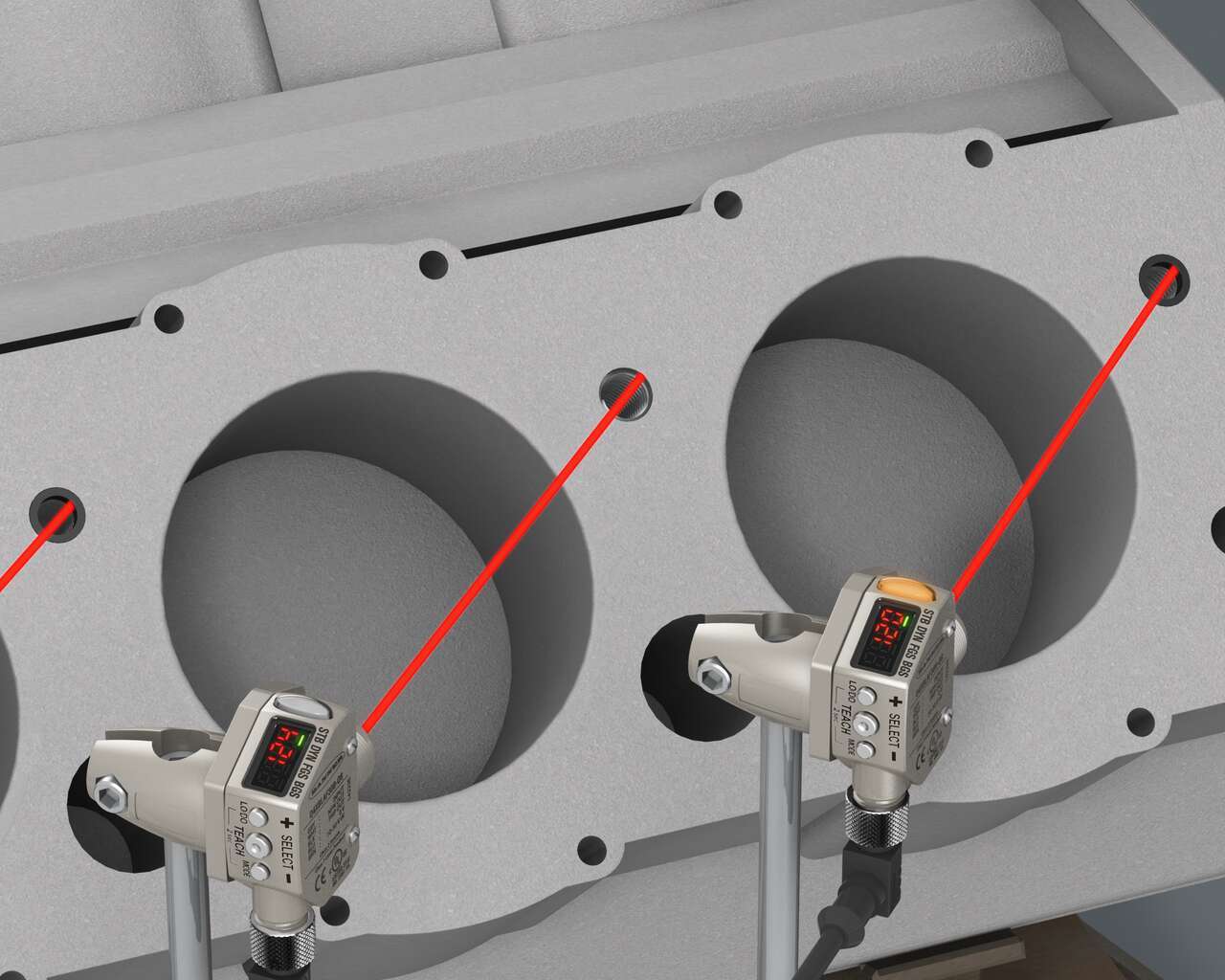
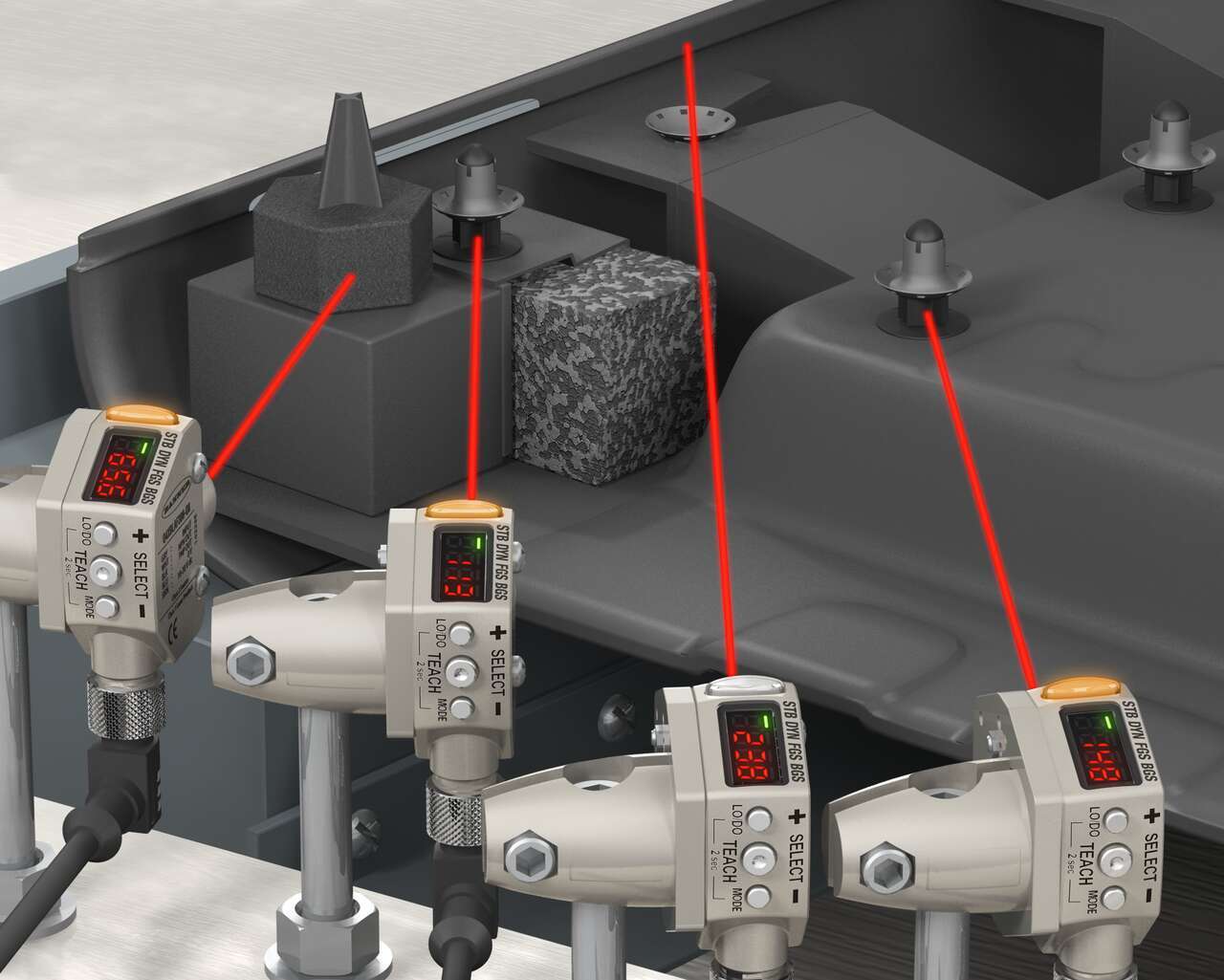
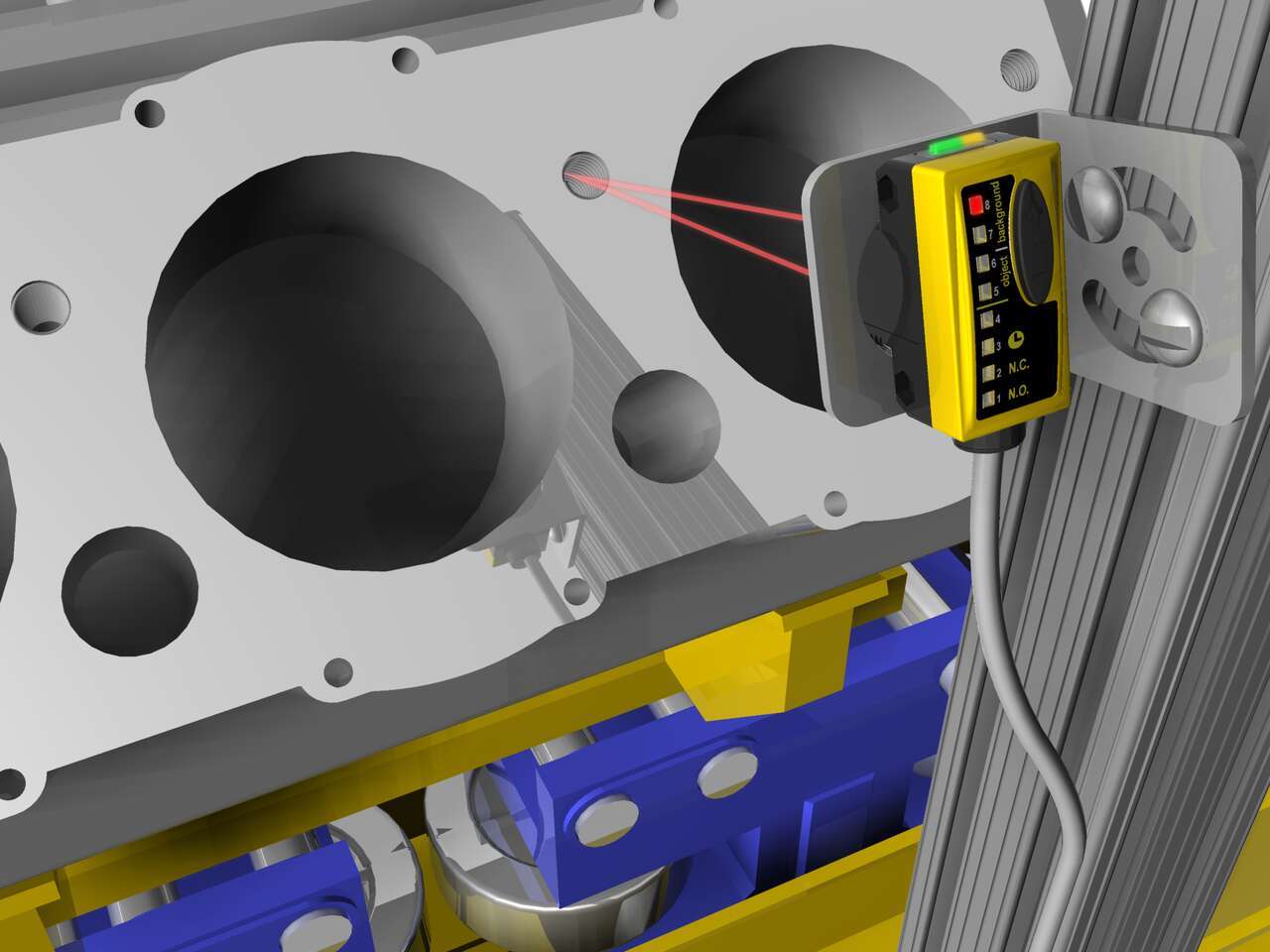
Detección de Empaque de Hule en Bloque de Motor
-
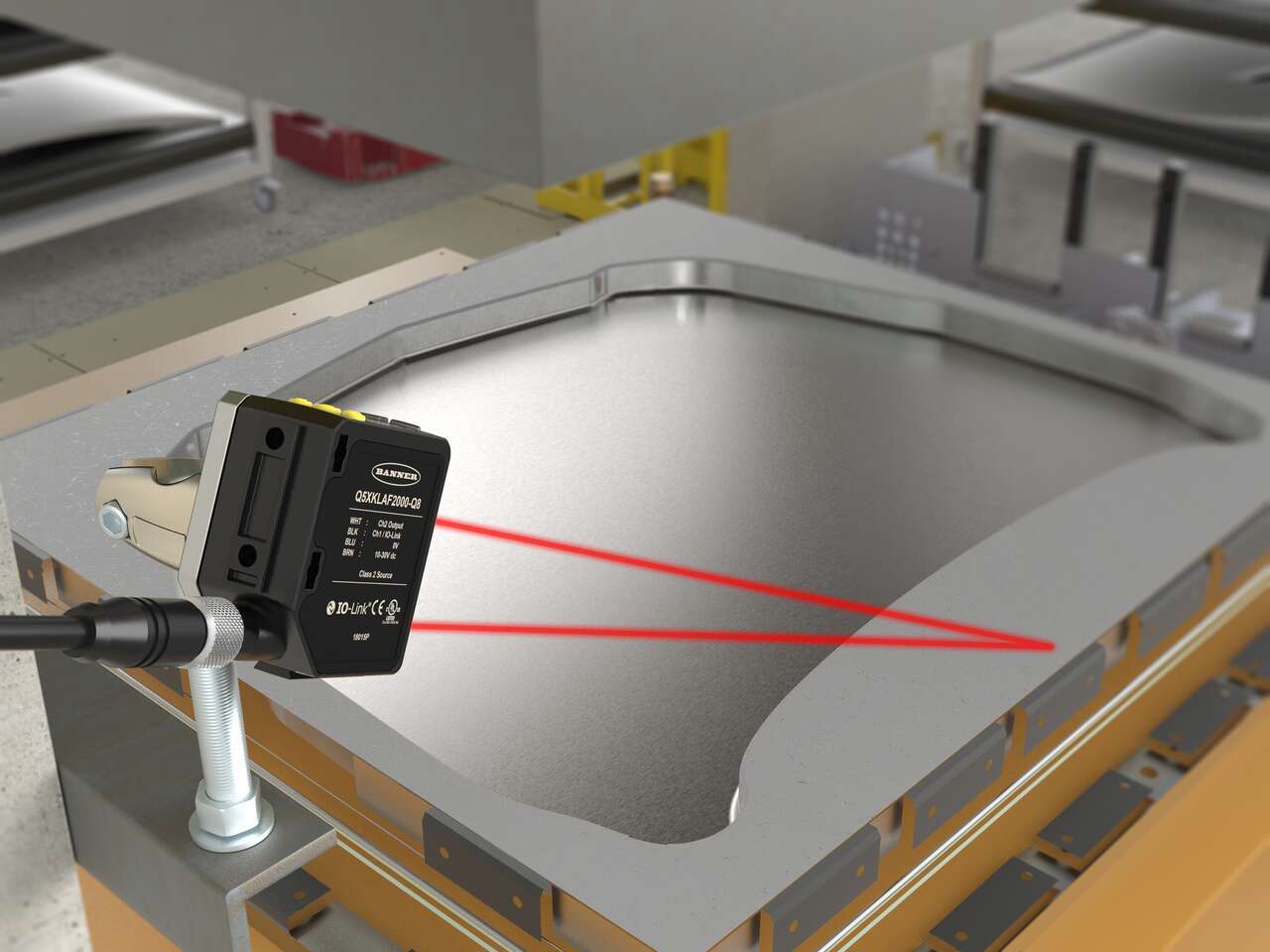
Verificación de las Hojas de Metal en una Prensa de Estampado
-

Detección de Botellas Volcadas en una Línea de Embotellado de Alta Velocidad
-
Conteo de Envases de Plástico Transparente en una Banda Transportadora
-
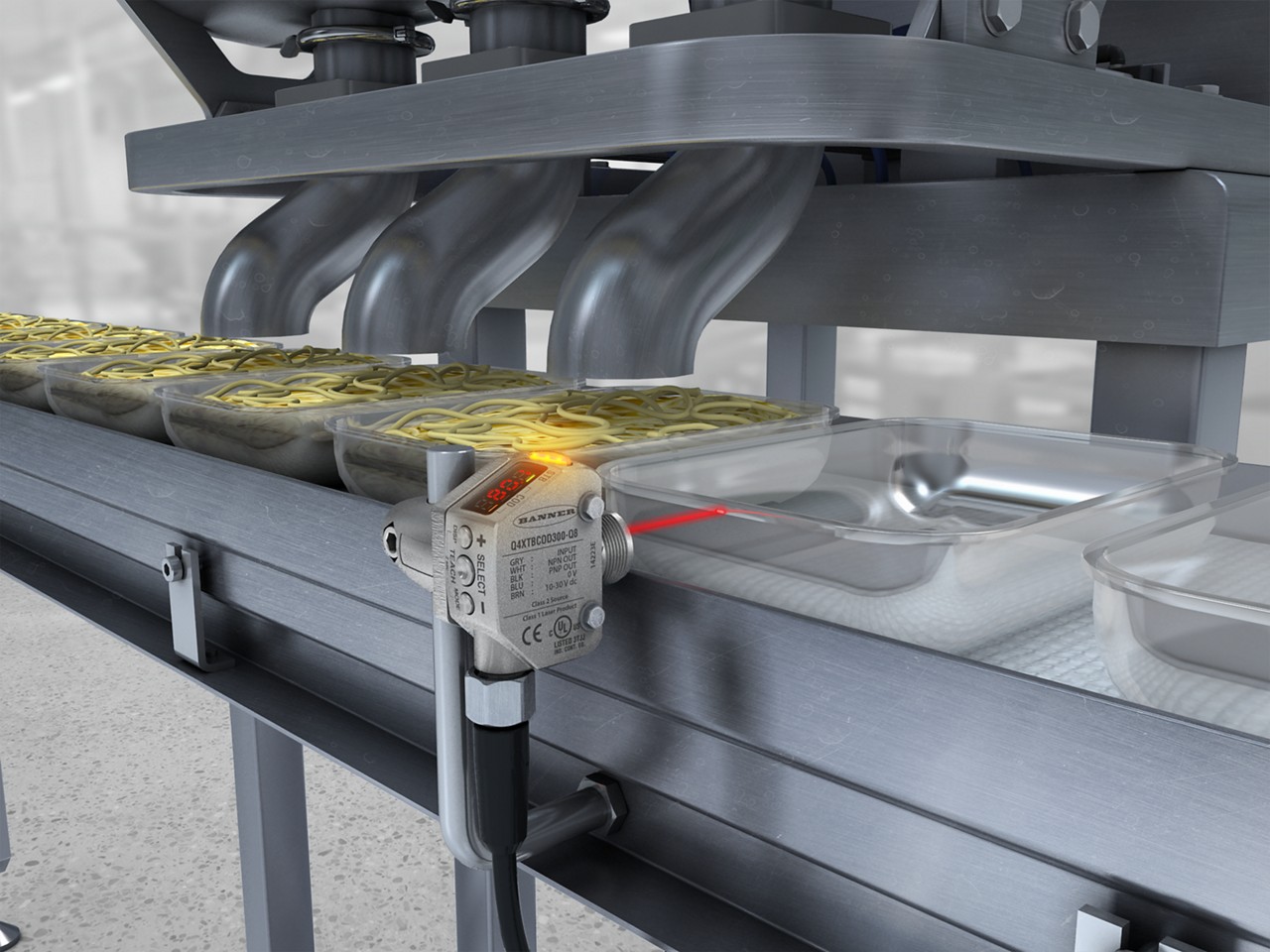
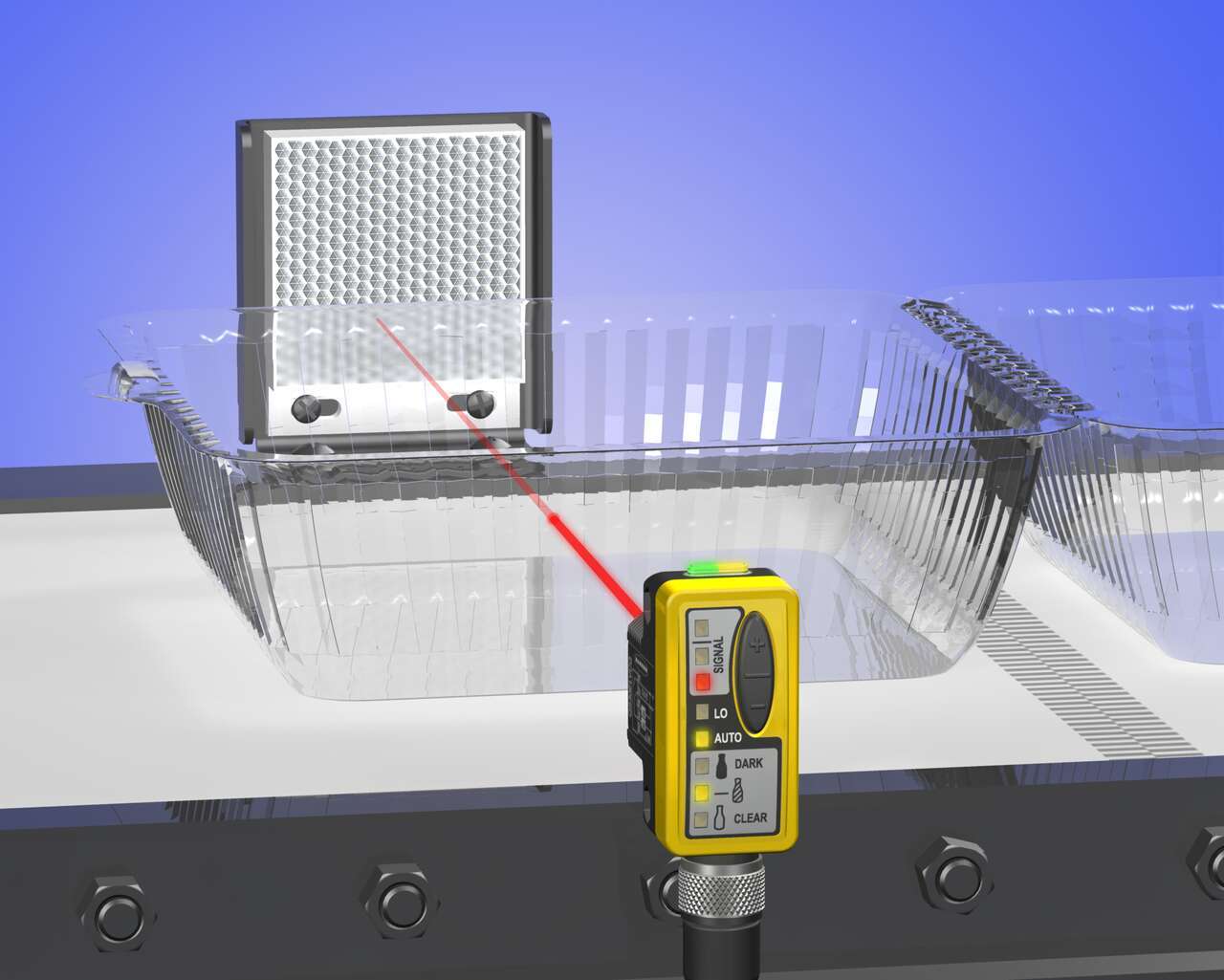
Detección de Bandeja Transparente en la Tolva en las Unidades de Almacenamiento de Alimentos
-
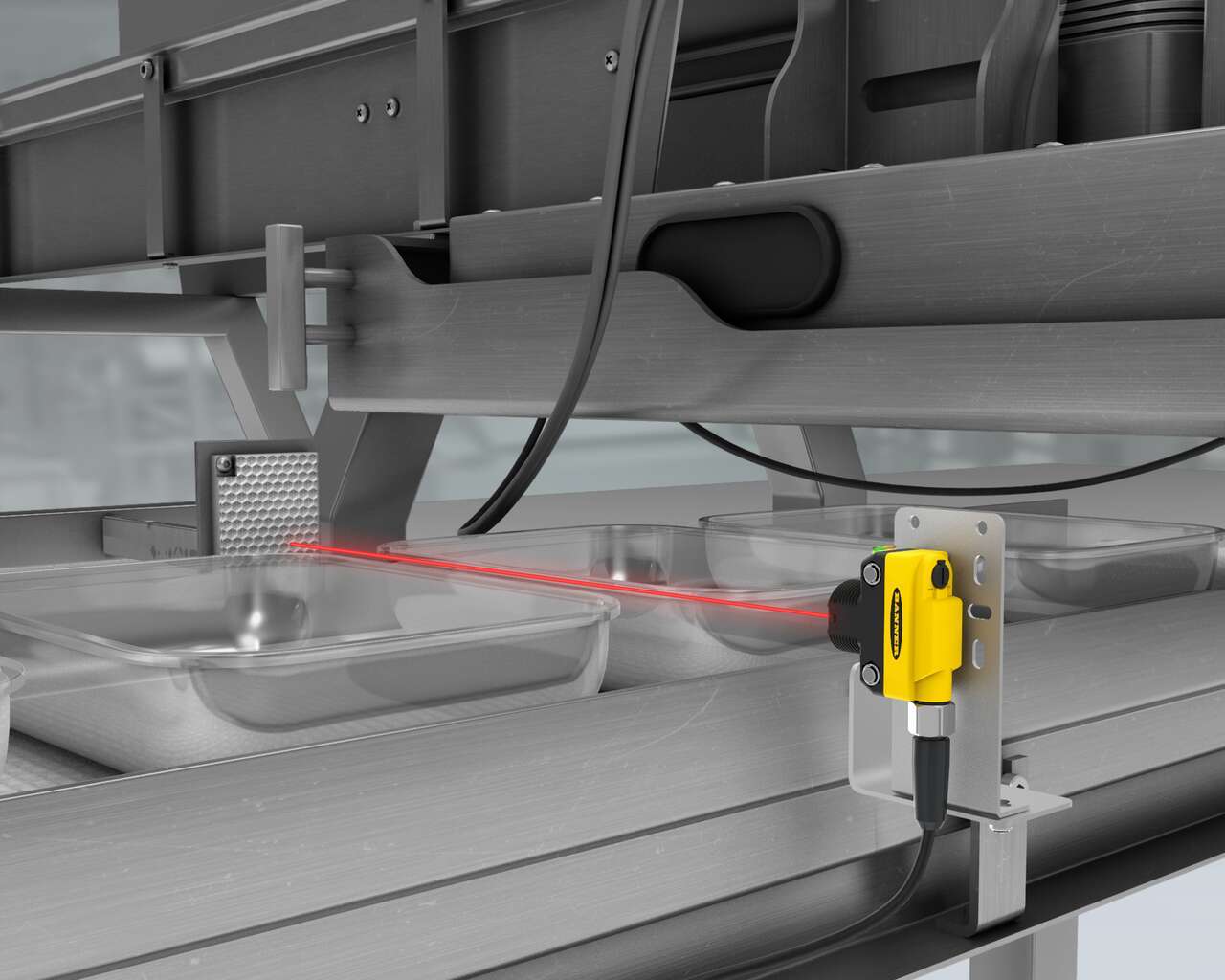
Control de la Presión en la Línea de Separación de Bandejas Transparentes de Comida
-

Objetivos Obscuros y de Bajos Contraste
-

Detecting Clear Glass and Plastic PET Bottles in Washdown Environments
-
Detección de Botellas Transparentes en un Entorno de Lavado a Presión
-

Verificación de Nivel de Llenado Sin Contacto
-
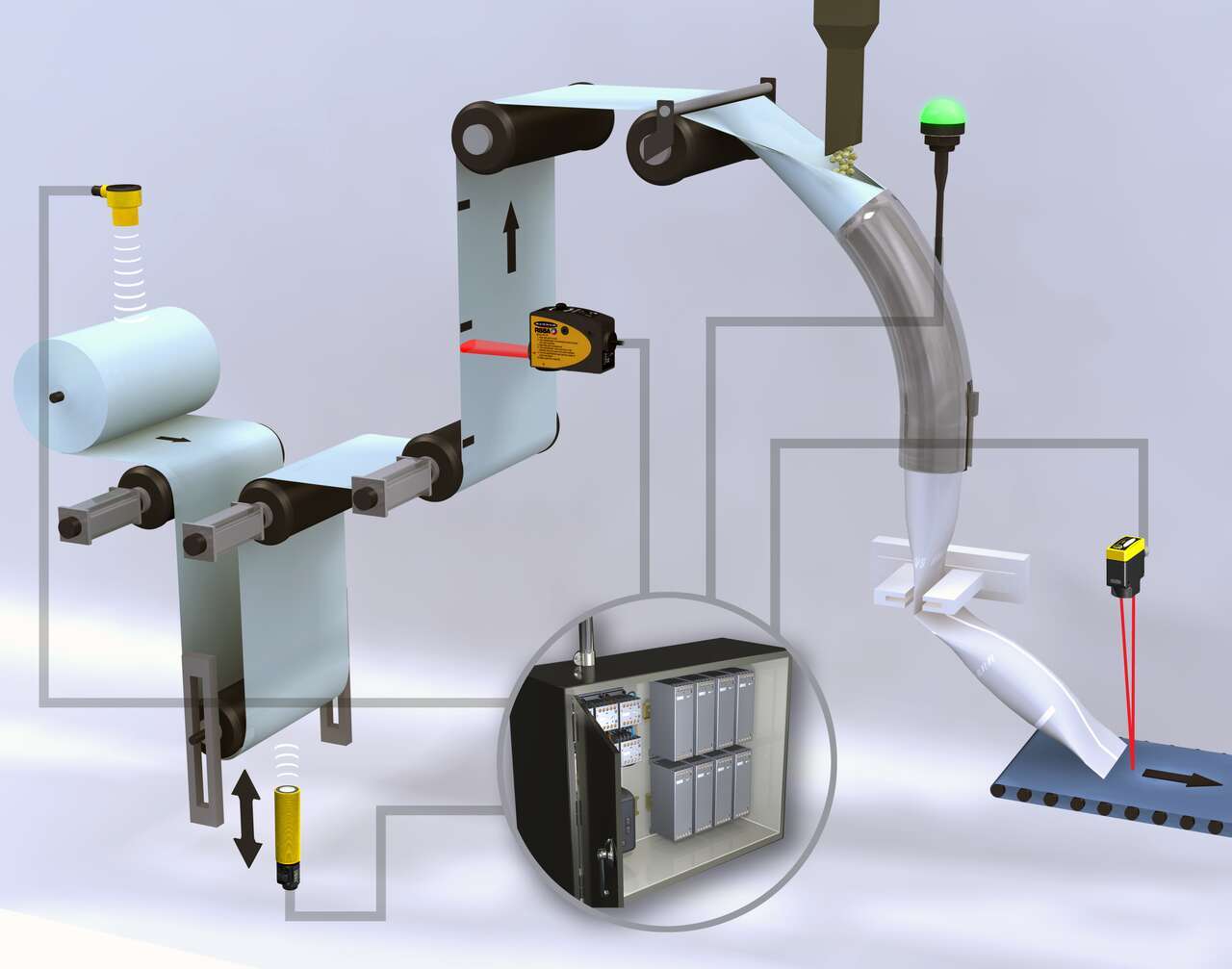
Soluciones para Selladoras Verticales (VFFS)
-
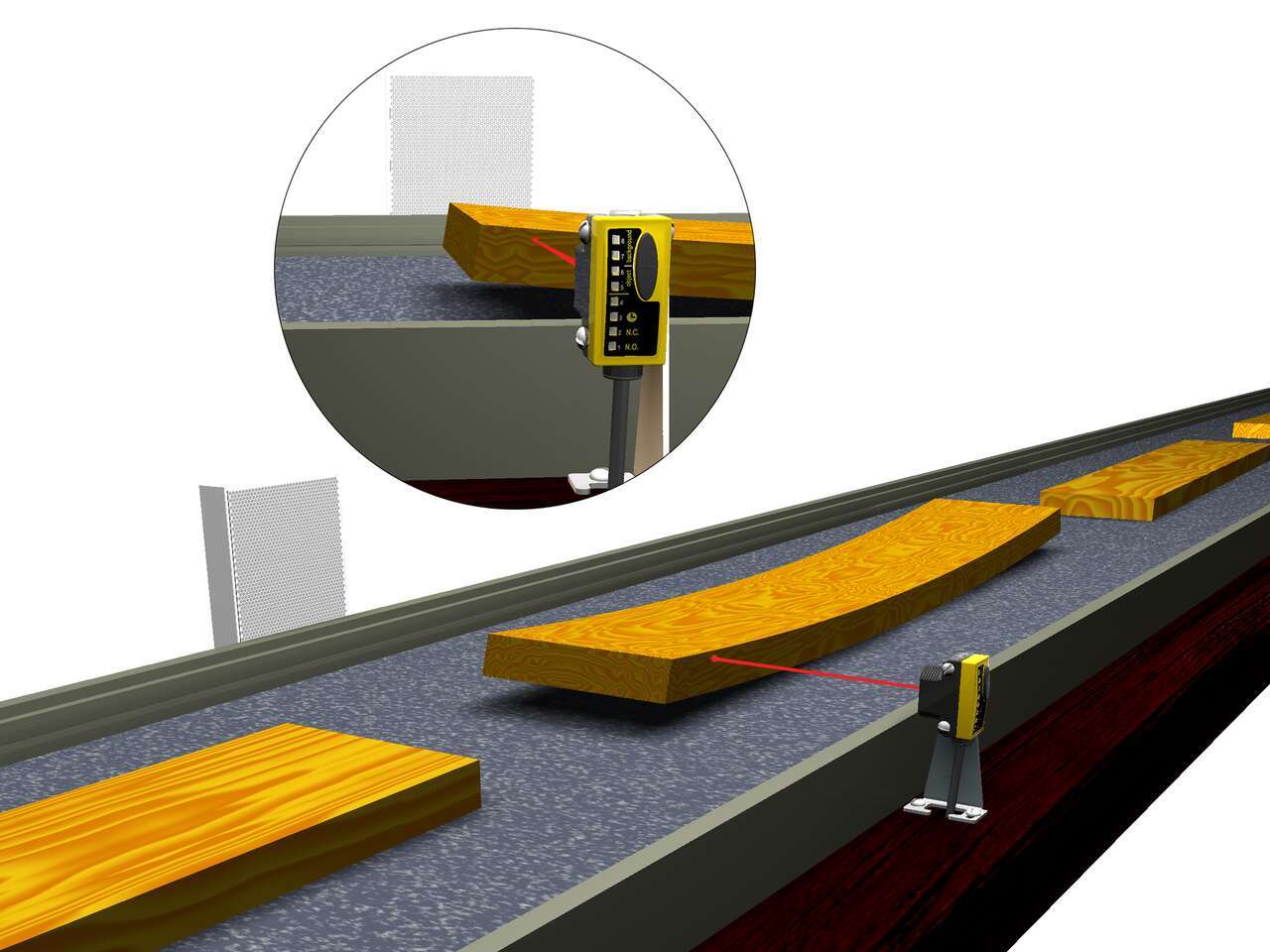
Board Warp Detection with a QS30
-

Detección de Atascos en un Transportador
-
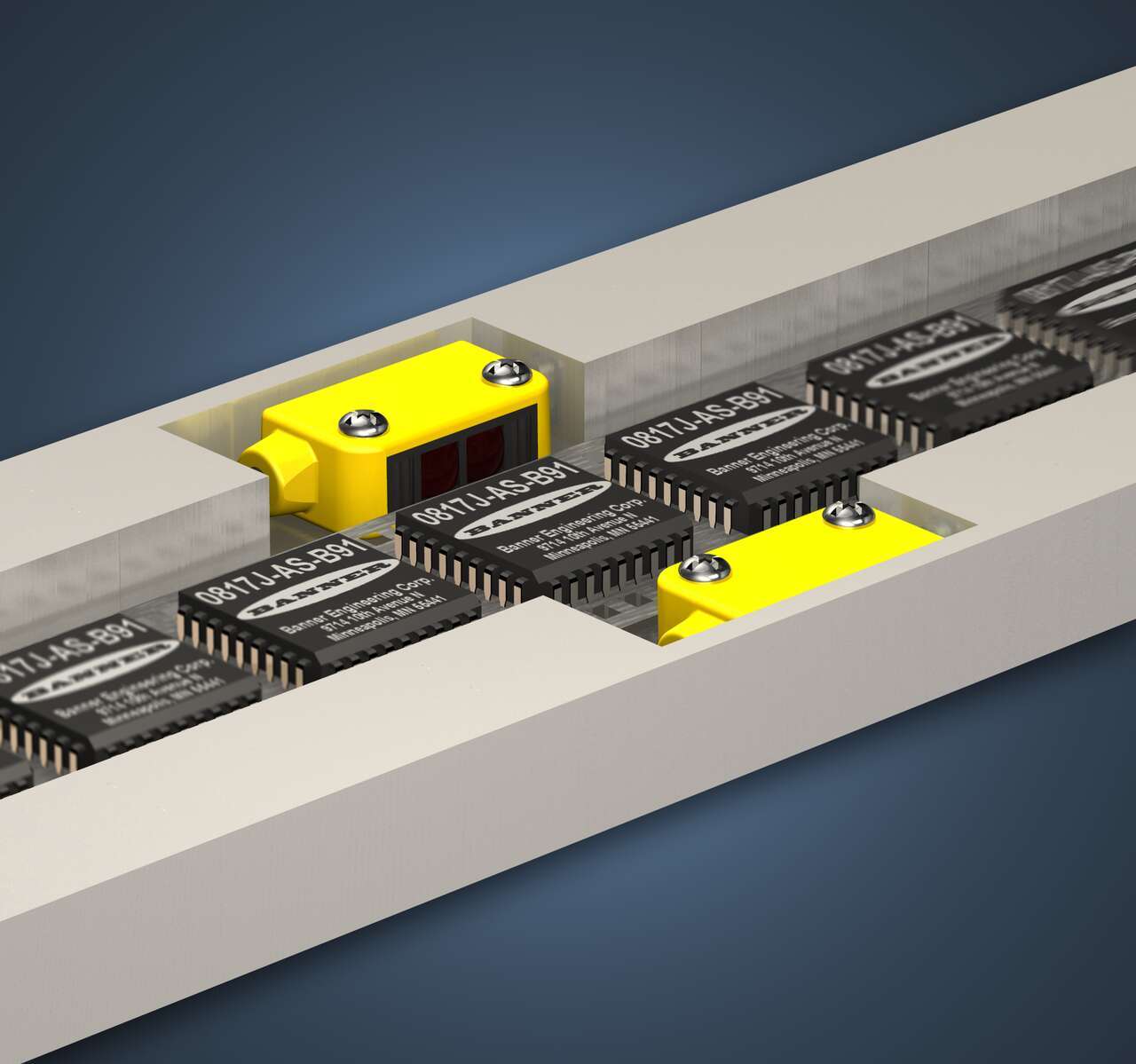
Contando Circuitos Integrados
-

Transportador de Alcance Extendido
-

Verificación de Nivel de Llenado en Botellas de Agua
-
Disparo para Inspección en Impresora
-

Detección de Motor
-

Detección de Piezas en un Tazón Alimentador
-

Detección de Bandejas de Plástico Negro en una Tolva y Estación de Llenado
-
Detección de la Orientación de Tapas
-

Detección de Disco Duro
-

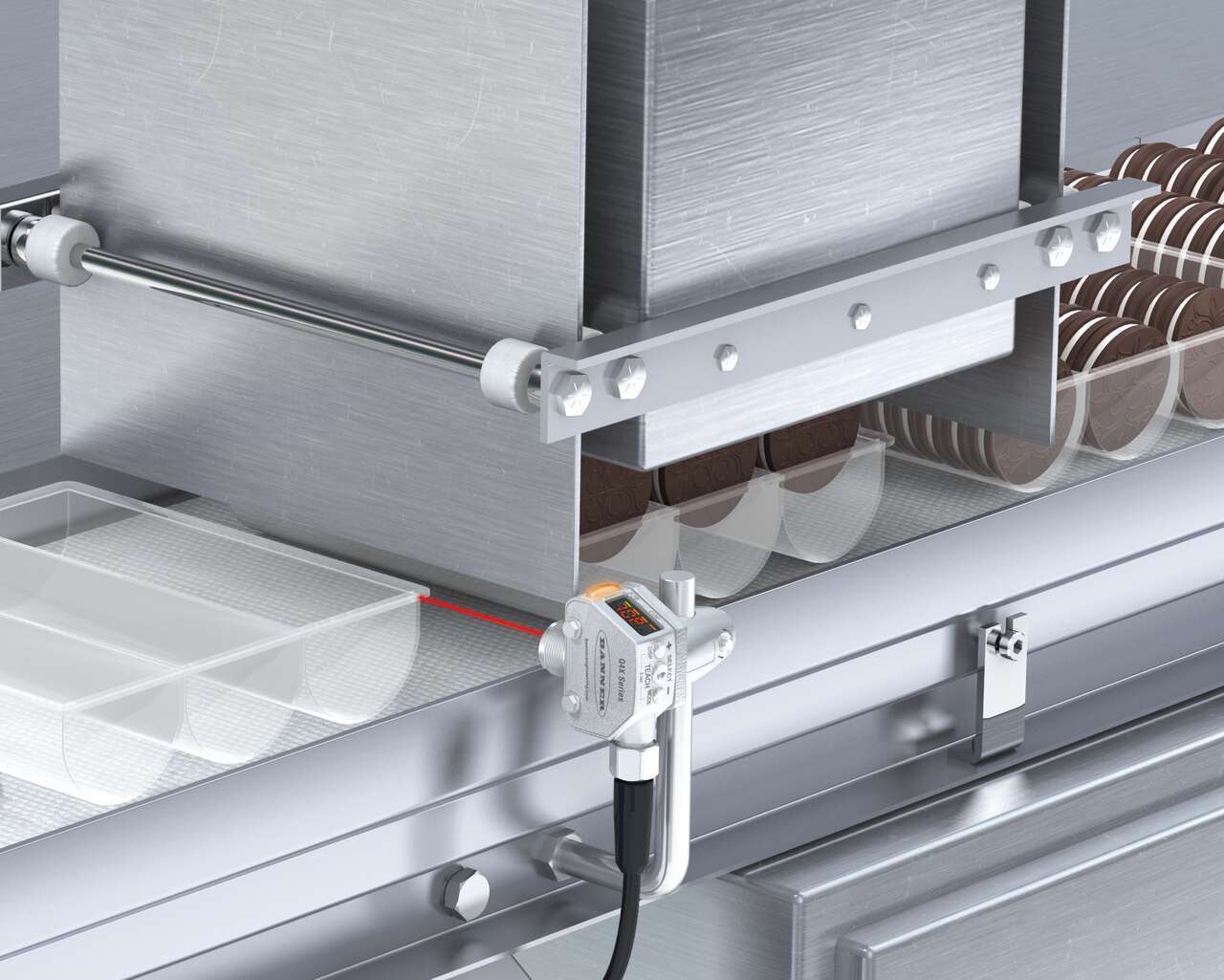
Inspeccionar Chocolates Faltantes en una Línea de Envasado
-

Detección de Etiquetas
-

Comprobación de Errores para Chips de Circuito Integrado Cargados en la Cinta de Bolsillo
-
Detección de Pestañas Abiertas en Cenas Congeladas Empaquetadas
-

Detección de Botellas de PET para Regular el Flujo del Producto
-
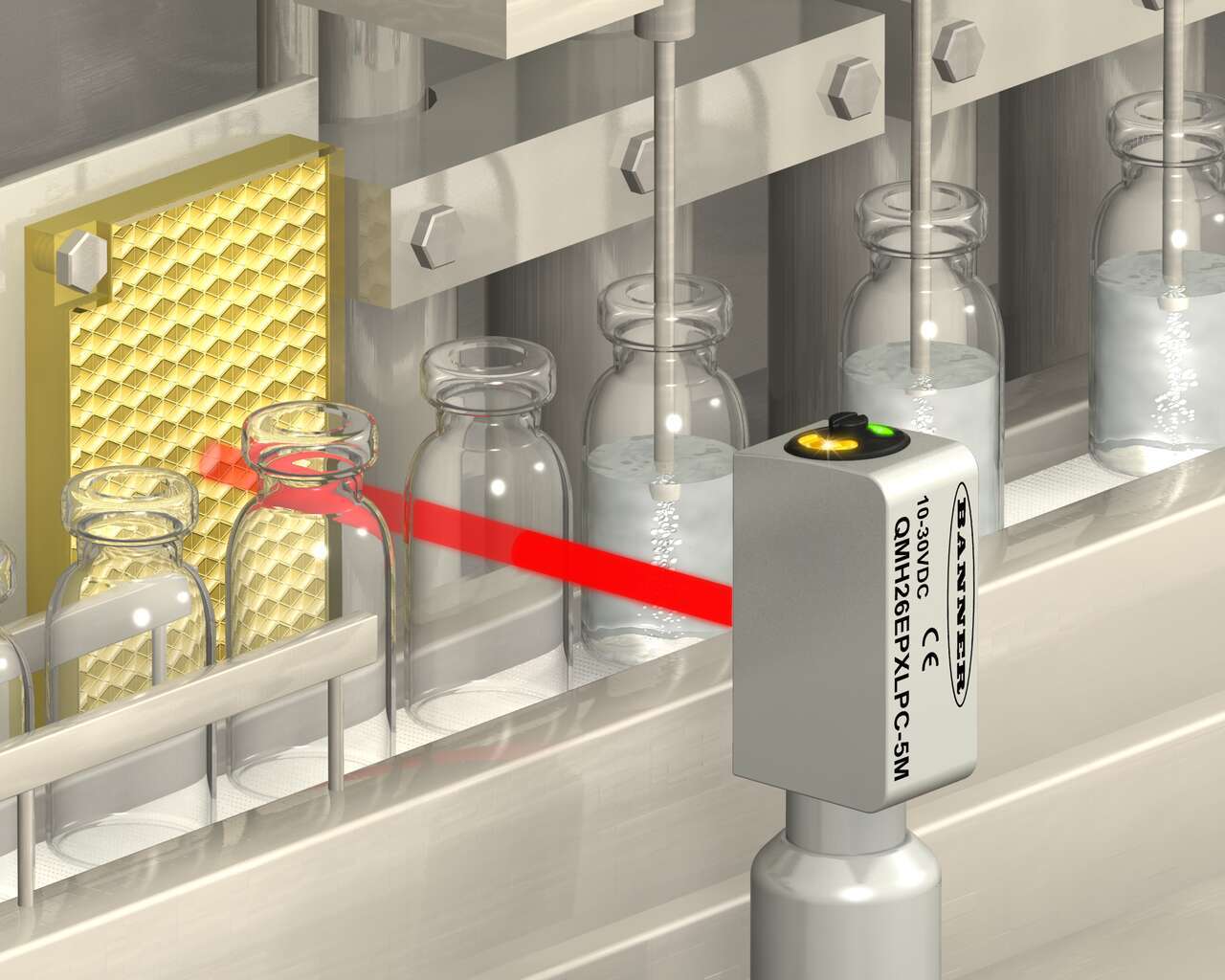
Sensores Higiénicos para Detectar Frascos de Vidrio en Entornos con Químicos Abrasivos
-
Verificación de las Etiquetas en Botellas
-

Conteo de Cajas de Cartón
-
Clasificación por Color
-
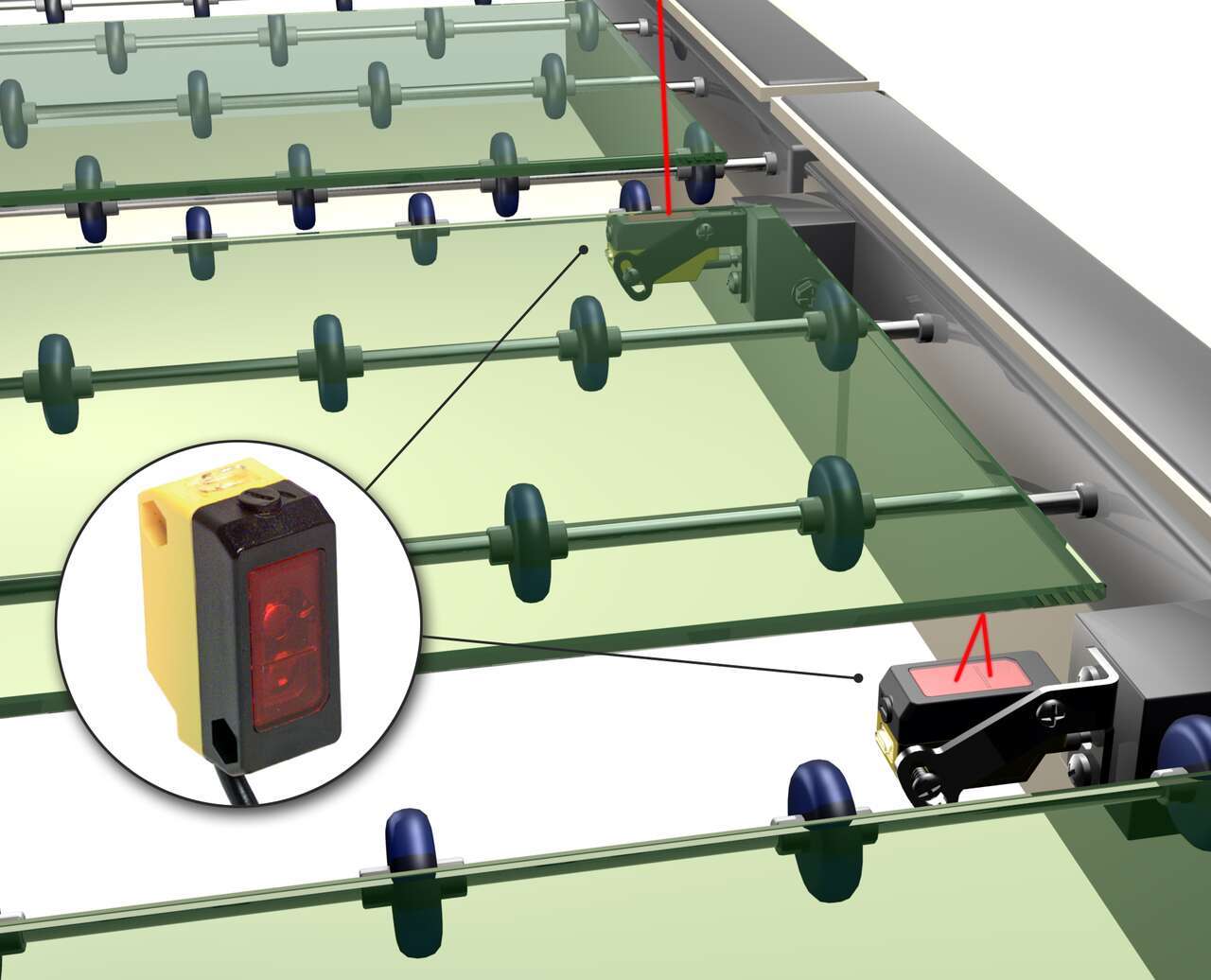
Detección de Páneles de Vidrio
-
Detección de Fugas de Líquido con un QS18
-

Clasificación de Correo por Tamaño
-
Objetos sobre una Banda Transportadora
-

Control de Flujo en Lata de Refresco
-
Estación de Admisión para Auto Clasificación
-
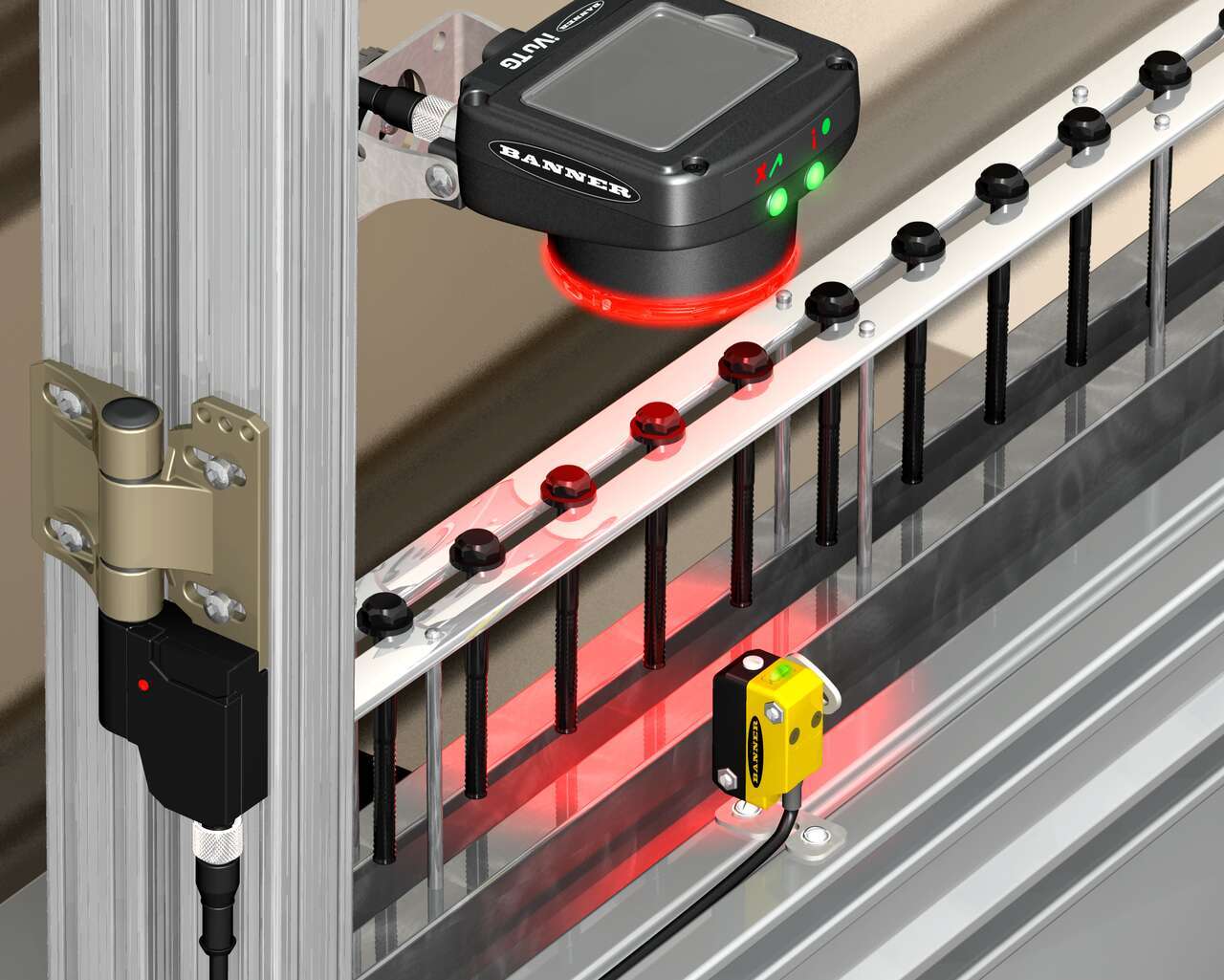
Cierre de Proximidad de Pruebas de Error en la Línea de Montaje
-

Inspección de Tapa de Botella
-

Detección de Tapas de Botellas de Varios Colores
-

Verificación de Presencia de Parte
-
Inspección de Piezas en un Alimentador Lineal
-
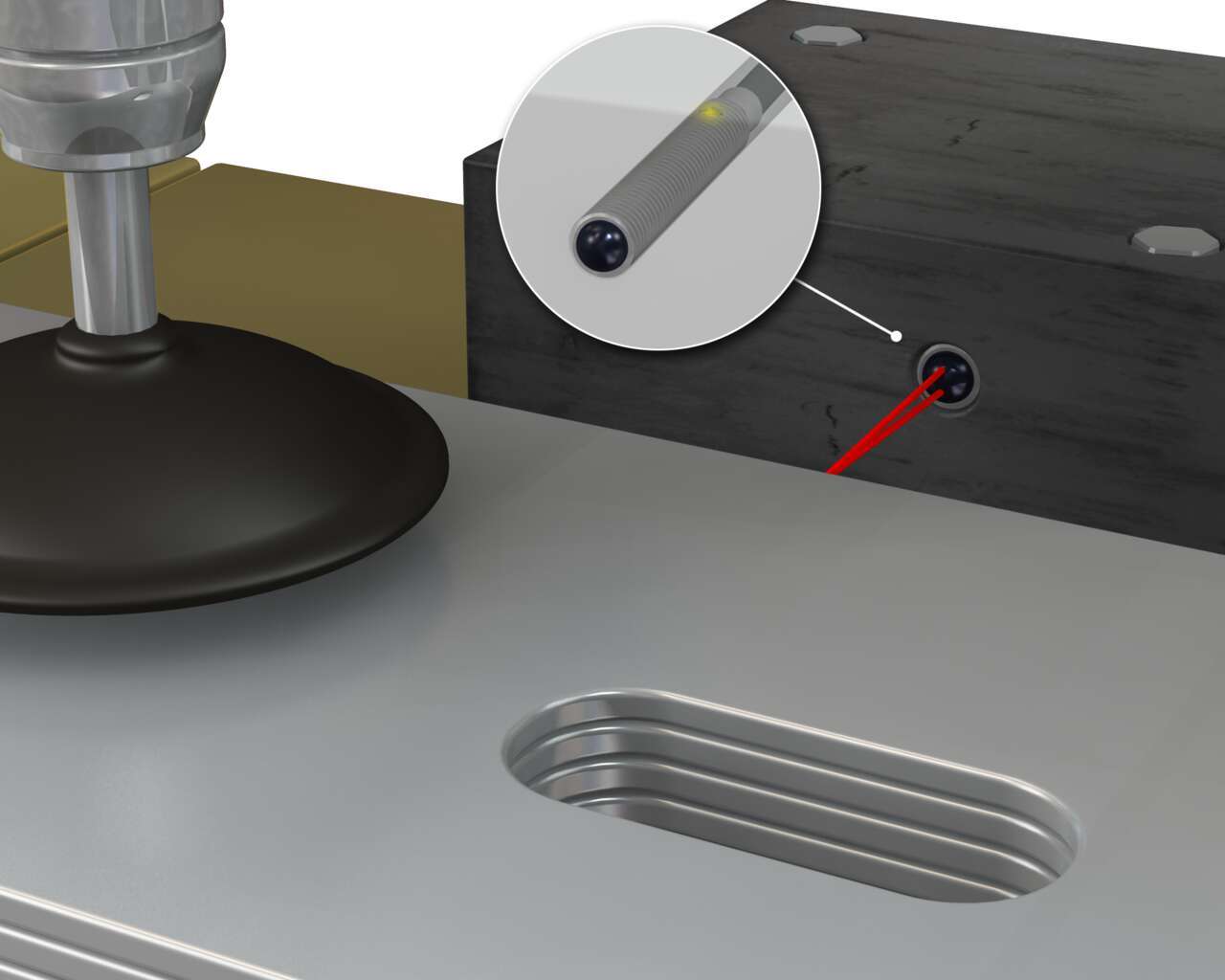
Detección de Roscas en Barreno
-

Seguimiento de Frascos a Través de un Laboratorio Clínico Automatizado
-

Detección de Envase de Vidrio Transparente para Alimentos y Bebidas Splash Zone
-
Detección de Envases Plásticos Transparentes para Alimentos en un Entorno Sanitario
-

Detección de Envolturas Reflectivas en un Transportador
-
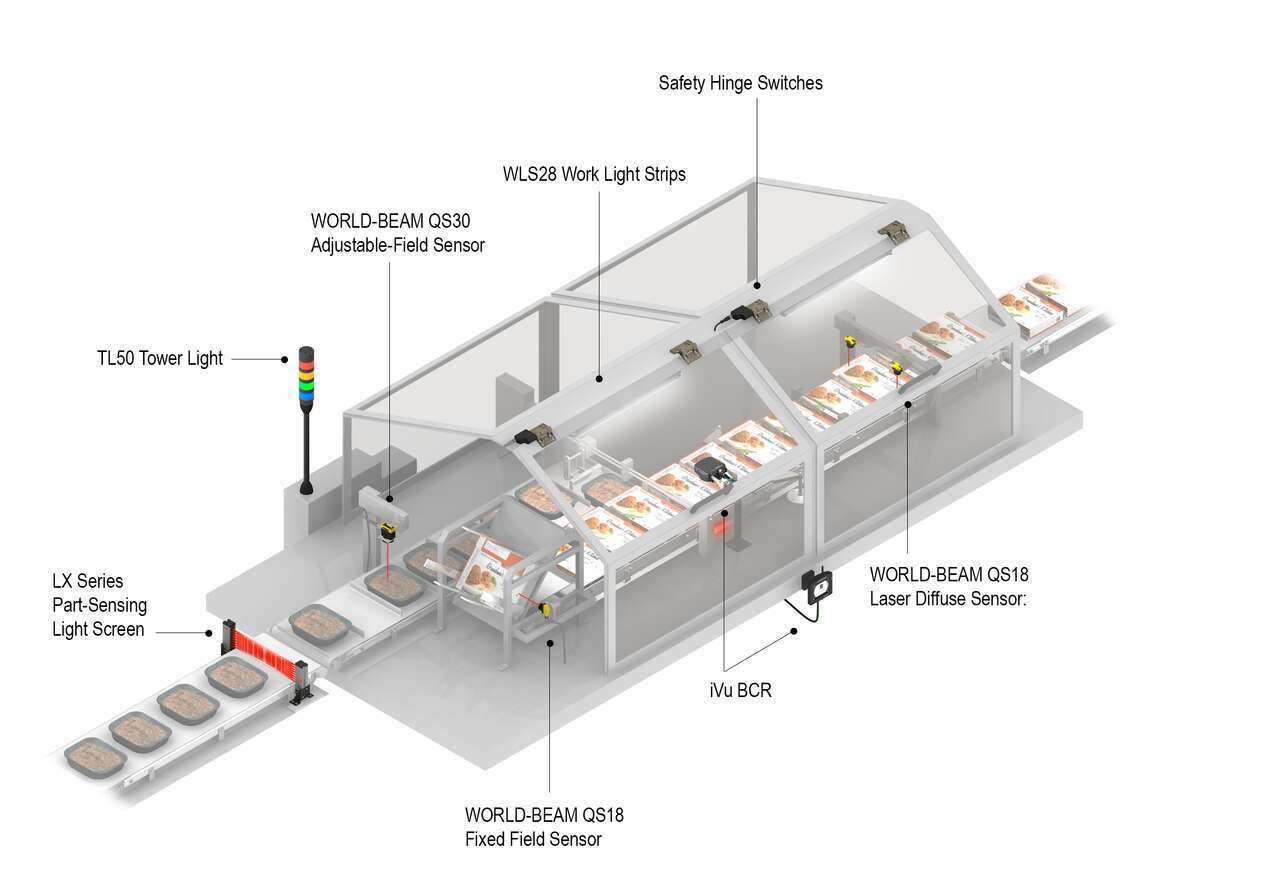
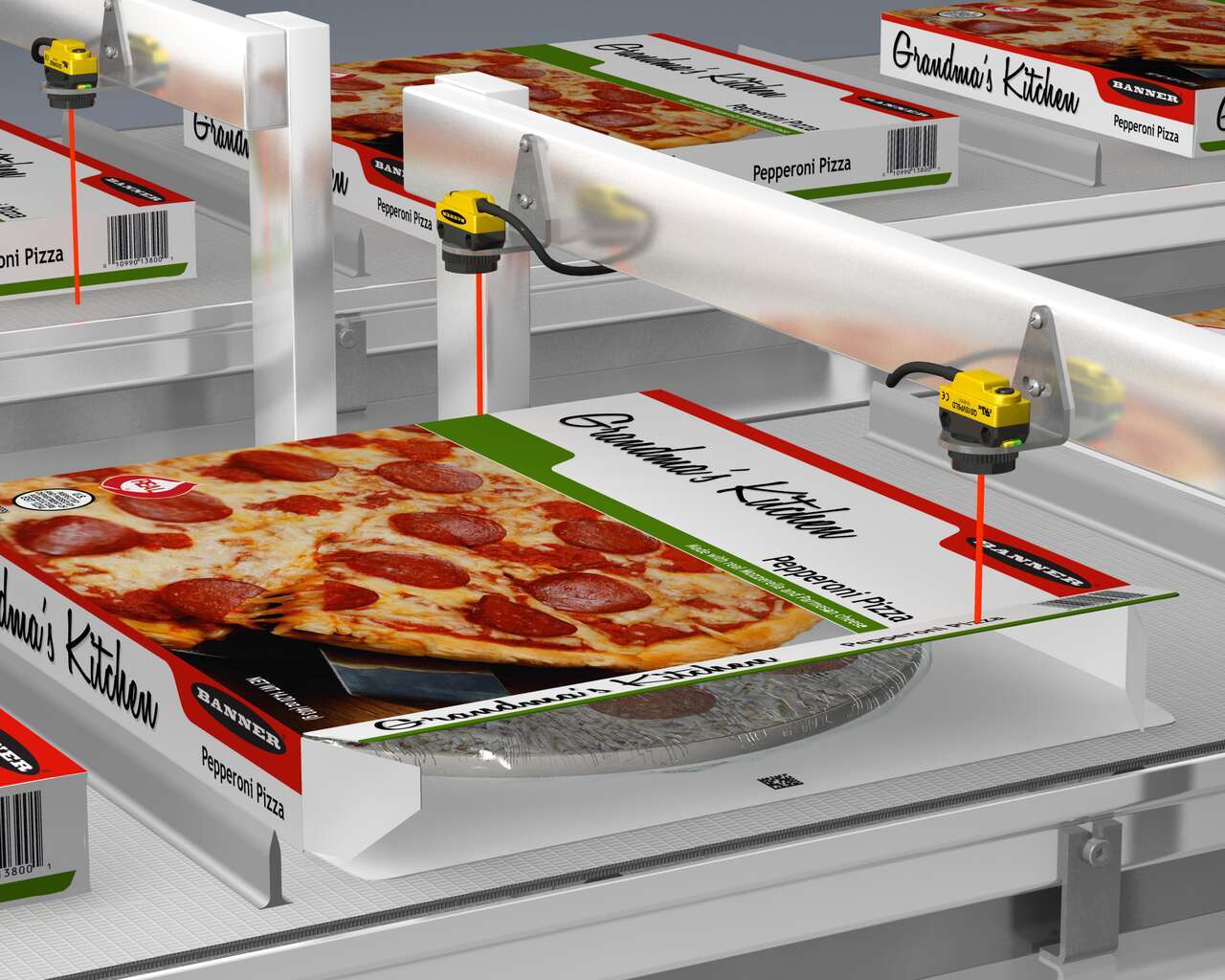
Packaging Frozen Dinners on a Cartoner
-

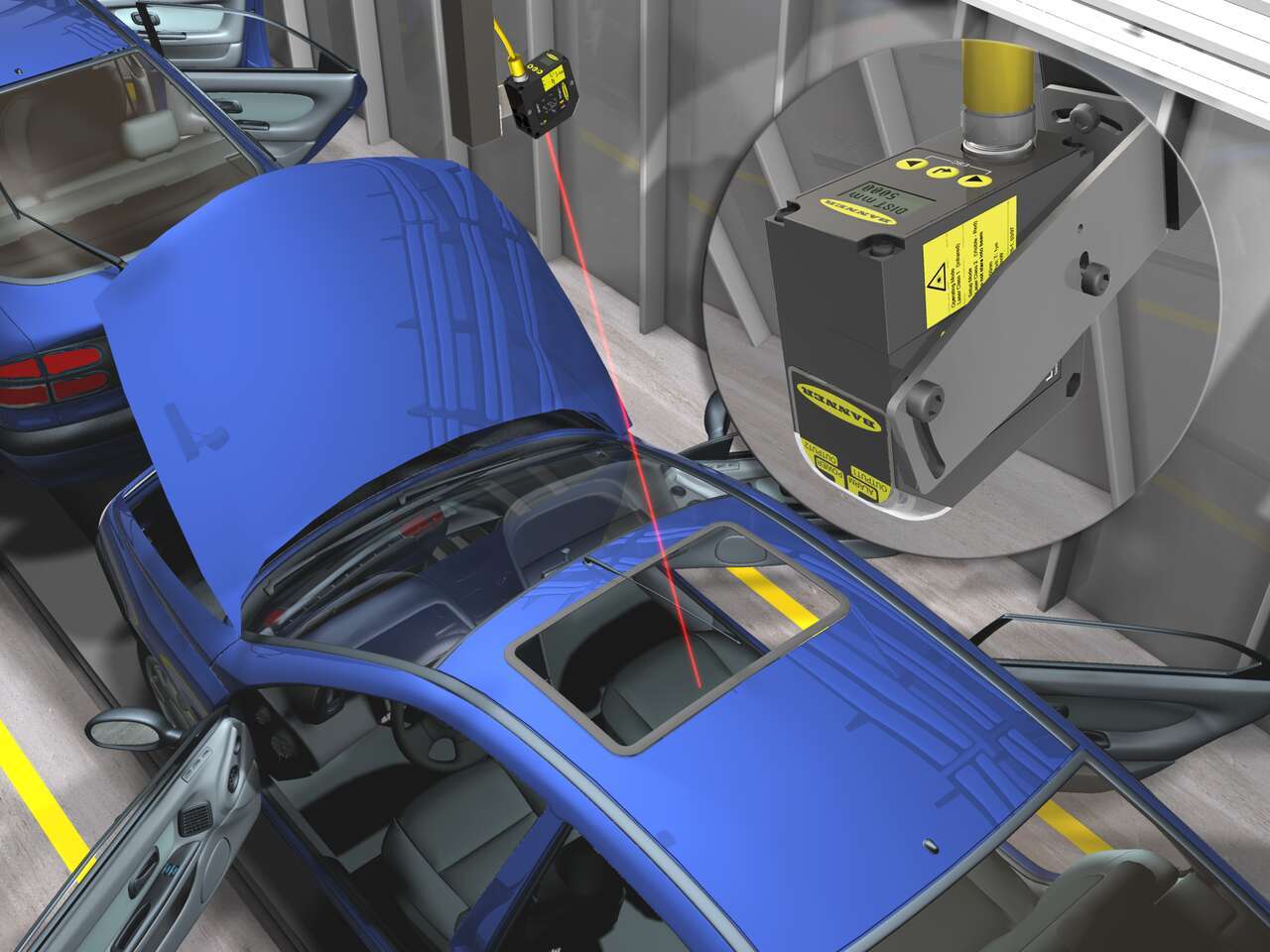
Lavado de Auto
-

Objetivos Claros y Reflectantes.
-

Posición del Vehículo en el Lavado Automático con Ambiente Extremo
Recursos
El último folleto de Soluciones de Sensores Fotoeléctricos explora los diferentes tipos de sensores Banner y cómo elegir el adecuado para su aplicación, ya sea conteo de objetos, control de calidad, presencia o ausencia de objetos u otra necesidad de automatización.
