
![Vibration Monitoring a Main Air Handler [Success Story]](/content/dam/banner-engineering/3d-renders/application-notes/predictive-maint/qm30vt-motor-vibration-detection.psd/jcr:content/renditions/cq5dam.thumbnail.319.319.png)

![Maintenance prédictive des pièces rotatives d'un convoyeur [Exemple de réussite]](/content/dam/banner-engineering/photography/general---stock-photography/stock_photo_new/AdobeStock_111970609.jpeg/jcr:content/renditions/cq5dam.thumbnail.319.319.png)

![Mesure de température pour une application d'assainissement thermique [Exemple de réussite]](/content/dam/banner-engineering/3d-renders/application-notes/wcc-migration/2013/SURE-CROSS-Flex-Power-w-RTD---Temp-Measure-in-Flour-Mill.psd/jcr:content/renditions/cq5dam.thumbnail.319.319.png)

![Détection de différents repères [Exemple de réussite]](/content/dam/banner-engineering/photography/general---stock-photography/valueprop/edited/wcc-migration/2015/R58_roll_closeup.jpg/jcr:content/renditions/cq5dam.thumbnail.319.319.png)

![Simplification de la gestion de dispositifs de sécurité [Exemple de réussite]](/content/dam/banner-engineering/photography/general---stock-photography/valueprop/edited/wcc-migration/2015/Algus_MKuhlow.jpg/jcr:content/renditions/cq5dam.thumbnail.319.319.png)




![Des barres d'éclairage à LED plus puissantes qui réduisent les délais et les coûts de construction des machines [Exemple de réussite]](/content/dam/banner-engineering/3d-renders/application-notes/wcc-migration/WLB32%20Muti-Station%20Test%20Workstation%20Illumination%20(High_Res_PSD).psd/jcr:content/renditions/cq5dam.thumbnail.319.319.png)
![Installation rapide d'une solution d'éclairage durable à LED pour la mise en lumière des postes d'inspection de bandes [Exemple de réussite]](/content/dam/banner-engineering/photography/success-story-photography/WLB32-LED-Lights-Web-Inspection.jpg/jcr:content/renditions/cq5dam.thumbnail.319.319.png)
![Indication d'état sur les véhicules sans conducteur [Exemple de réussite]](/content/dam/banner-engineering/photography/general---stock-photography/stock_photo_new/AdobeStock_189577689.jpeg/jcr:content/renditions/cq5dam.thumbnail.319.319.png)

![Mesure précise des ingrédients de boulangerie [Exemple de réussite]](/content/dam/banner-engineering/photography/general---stock-photography/valueprop/edited/wcc-migration/2015/dropbox3.jpg/jcr:content/renditions/cq5dam.thumbnail.319.319.png)
![Contrôle de petits connecteurs [Exemple de réussite]](/content/dam/banner-engineering/3d-renders/application-notes/wcc-migration/2014/LE550-Vehicle-Seat-Weight-Sensor-Connector.psd/jcr:content/renditions/cq5dam.thumbnail.319.319.png)
![Zéro défaut sur un bobinoir industriel [Exemple de réussite]](/content/dam/banner-engineering/photography/general---stock-photography/valueprop/edited/wcc-migration/2015/Fotolia_51604759_M.jpg/jcr:content/renditions/cq5dam.thumbnail.319.319.png)
![Éclairage à LED utilisé pour contrôler les produits pharmaceutiques liquides [Exemple de réussite]](/content/dam/banner-engineering/3d-renders/application-notes/wcc-migration/2011/WLA-IV-Bag-Manual-Inspection---Particulates.psd/jcr:content/renditions/cq5dam.thumbnail.319.319.png)
![Présence de tubes de retour d'air sur une remplisseuse [Exemple de réussite]](/content/dam/banner-engineering/3d-renders/application-notes/wcc-migration/2013/iVu-C-Mount-Remote-washer-Tube-Inspection.psd/jcr:content/renditions/cq5dam.thumbnail.319.319.png)

![Mesure de la durée avant départ pendant les interventions [Exemple de réussite]](/content/dam/banner-engineering/3d-renders/application-notes/wcc-migration/2014/R-GAGE-Vehicle-Detection---Firehouse.psd/jcr:content/renditions/cq5dam.thumbnail.319.319.png)


Capteurs photoélectriques
Les capteurs photoélectriques, ou photocellules, émettent un faisceau lumineux qui permet de détecter la présence ou l'absence d'objets ou d'équipements, ainsi que toute modification des conditions d'une surface.
| Image de la série | Nom de la série | Portée en mode barrière (m) | Portée en mode rétroréflectif non polarisé (m) | Portée en mode rétroréflectif polarisé (m) | Portée en mode rétroréflectif polarisé laser (m) | Portée en mode diffus (mm) | Portée en mode suppression d’arrière-plan fixe (mm) | Portée en mode suppression d’arrière-plan réglable (mm) | Type d'émetteur | Matériau du boîtier | Indice de protection | Temps de réponse (μs) | Température de fonctionnement | IO-Link | Détection d'objets transparents |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
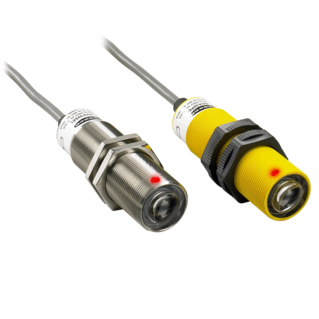
Image de la série  |
Nom de la série QS18 | Portée en mode barrière (m) 20 | Portée en mode rétroréflectif non polarisé (m) 6,5 | Portée en mode rétroréflectif polarisé (m) 3,5 | Portée en mode rétroréflectif polarisé laser (m) 10 | Portée en mode diffus (mm) 600 | Portée en mode suppression d’arrière-plan fixe (mm) 200 | Portée en mode suppression d’arrière-plan réglable (mm) 350 | Type d'émetteur LED et Laser | Matériau du boîtier Plastique | Indice de protection IP67 | Temps de réponse (μs) 600–800 | Température de fonctionnement -20 à +70 °C | IO-Link ✅ OUI | Détection d'objets transparents ✅ OUI |
Image de la série  |
Nom de la série Q20 | Portée en mode barrière (m) 20 | Portée en mode rétroréflectif non polarisé (m) 6 | Portée en mode rétroréflectif polarisé (m) 4 | Portée en mode rétroréflectif polarisé laser (m) — | Portée en mode diffus (mm) 1500 | Portée en mode suppression d’arrière-plan fixe (mm) 150 | Portée en mode suppression d’arrière-plan réglable (mm) 400 | Type d'émetteur LED | Matériau du boîtier Plastique | Indice de protection IP67 | Temps de réponse (μs) 850–1000 | Température de fonctionnement -20 à +60 °C | IO-Link ✅ OUI | Détection d'objets transparents 🚫 NON |
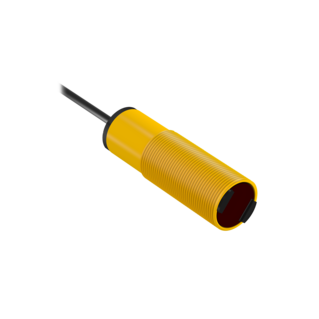
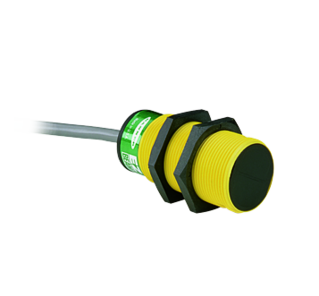
Image de la série  |
Nom de la série QS30 | Portée en mode barrière (m) 60 | Portée en mode rétroréflectif non polarisé (m) 12 | Portée en mode rétroréflectif polarisé (m) 8 | Portée en mode rétroréflectif polarisé laser (m) 18 | Portée en mode diffus (mm) 1400 | Portée en mode suppression d’arrière-plan fixe (mm) 600 | Portée en mode suppression d’arrière-plan réglable (mm) 600 | Type d'émetteur LED et Laser | Matériau du boîtier Plastique | Indice de protection IP67 | Temps de réponse (μs) 2000–5000 | Température de fonctionnement -20 à +70 °C | IO-Link 🚫 NON | Détection d'objets transparents ✅ OUI |
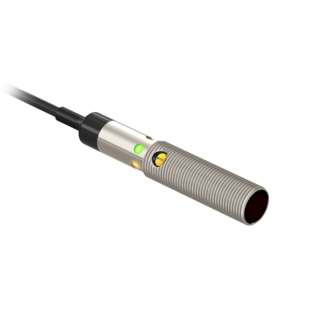
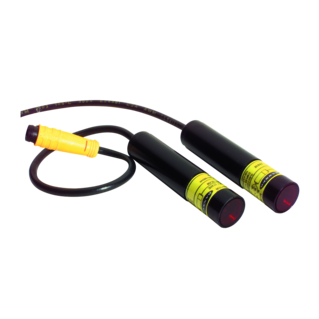
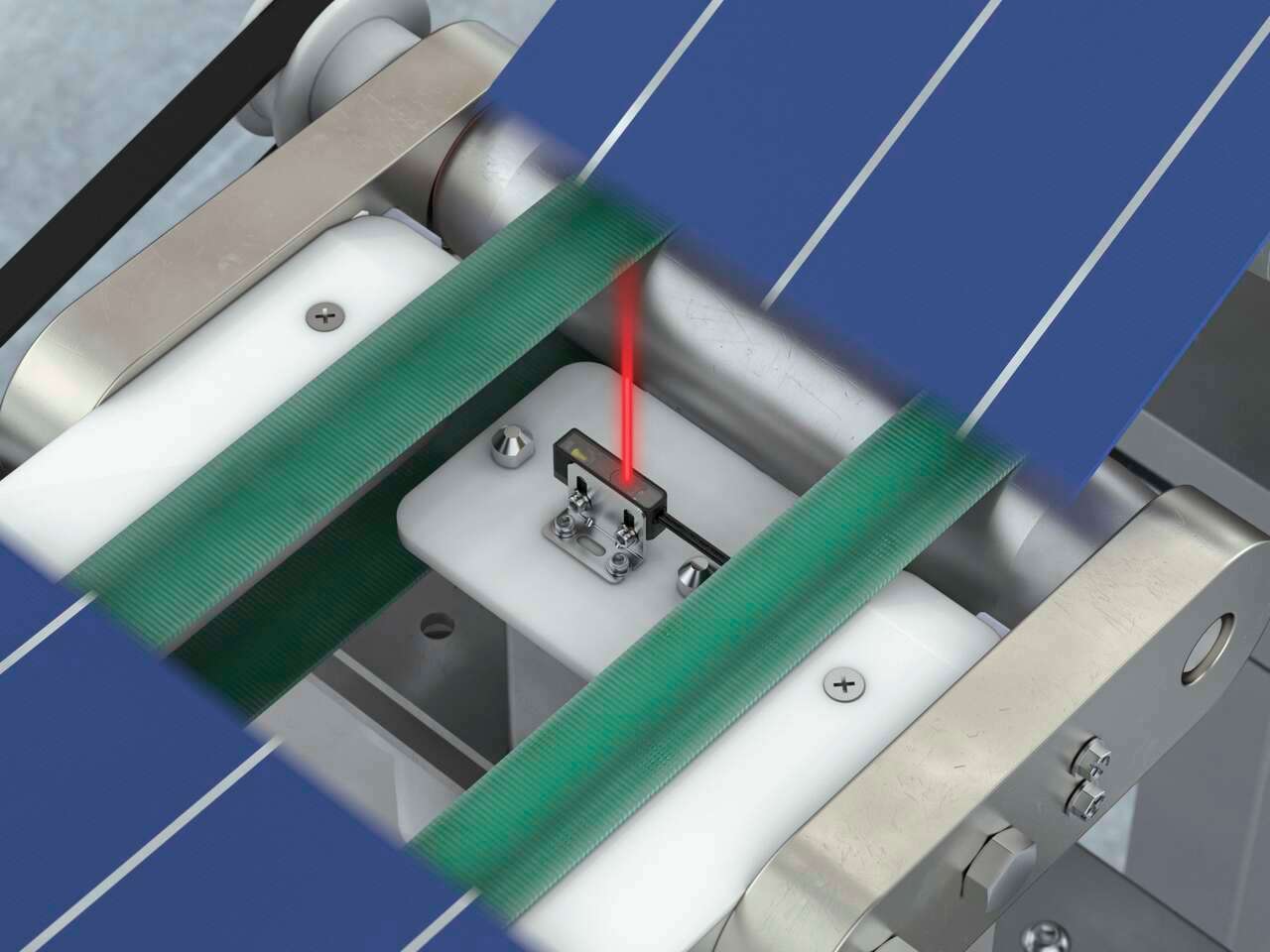
Image de la série  |
Nom de la série T18-2 | Portée en mode barrière (m) 25 | Portée en mode rétroréflectif non polarisé (m) — | Portée en mode rétroréflectif polarisé (m) 6 | Portée en mode rétroréflectif polarisé laser (m) — | Portée en mode diffus (mm) 750 | Portée en mode suppression d’arrière-plan fixe (mm) 200 | Portée en mode suppression d’arrière-plan réglable (mm) — | Type d'émetteur LED | Matériau du boîtier Plastique | Indice de protection IP67, IP68, IP69K | Temps de réponse (μs) 1500–2000 | Température de fonctionnement -40 à +70 °C | IO-Link 🚫 NON | Détection d'objets transparents 🚫 NON |
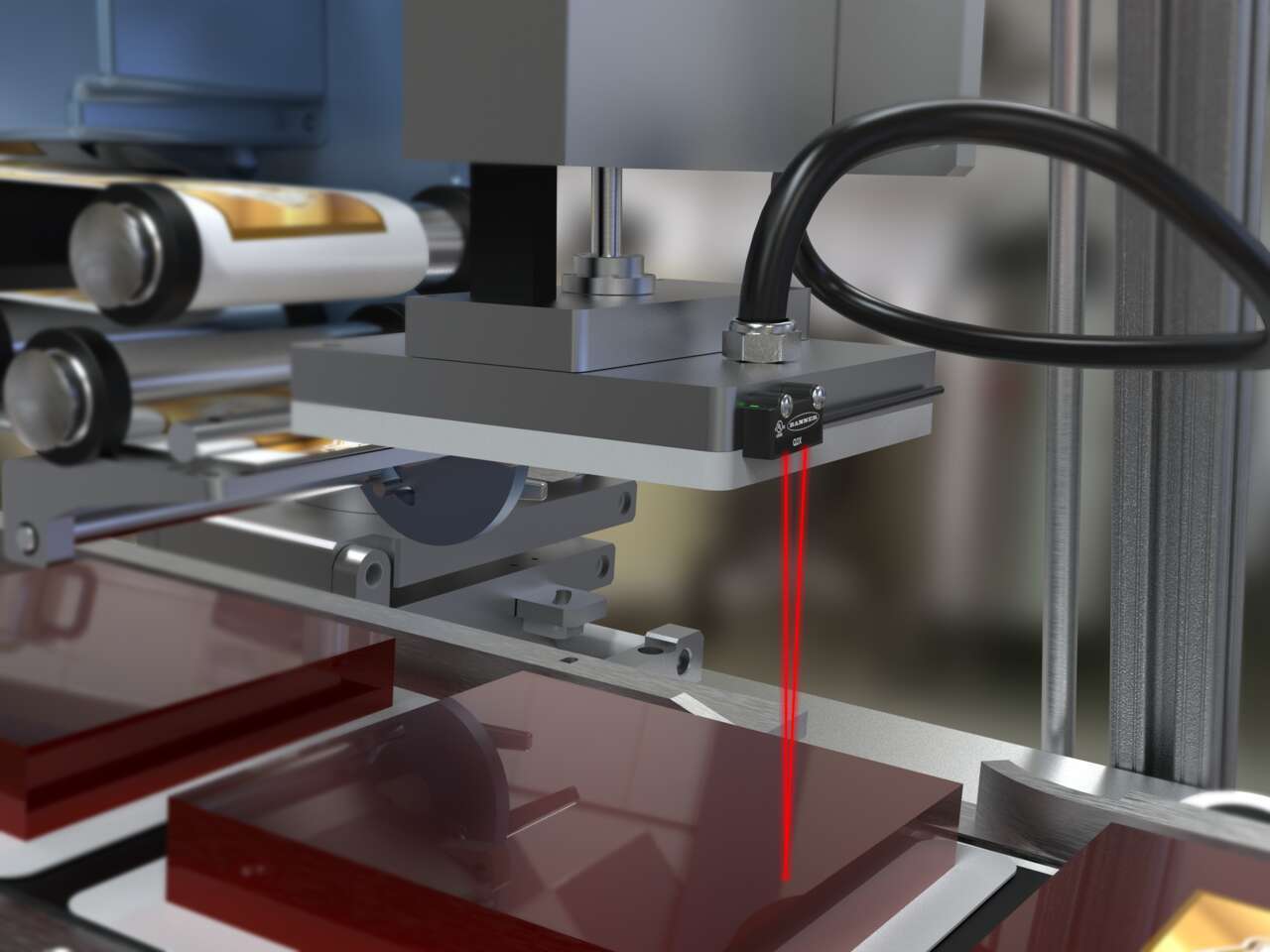
Image de la série  |
Nom de la série Q3X | Portée en mode barrière (m) — | Portée en mode rétroréflectif non polarisé (m) — | Portée en mode rétroréflectif polarisé (m) — | Portée en mode rétroréflectif polarisé laser (m) — | Portée en mode diffus (mm) 300 | Portée en mode suppression d’arrière-plan fixe (mm) 200 | Portée en mode suppression d’arrière-plan réglable (mm) — | Type d'émetteur Laser | Matériau du boîtier Métal | Indice de protection IP67, IP68, IP69K | Temps de réponse (μs) 250 | Température de fonctionnement -10 à +50 °C | IO-Link 🚫 NON | Détection d'objets transparents 🚫 NON |
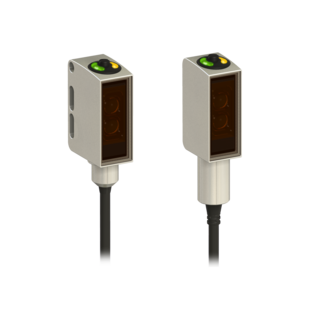
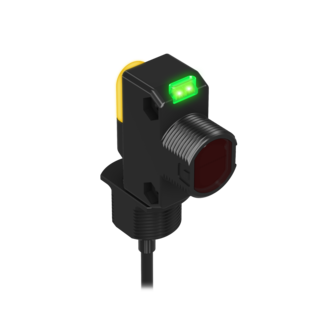
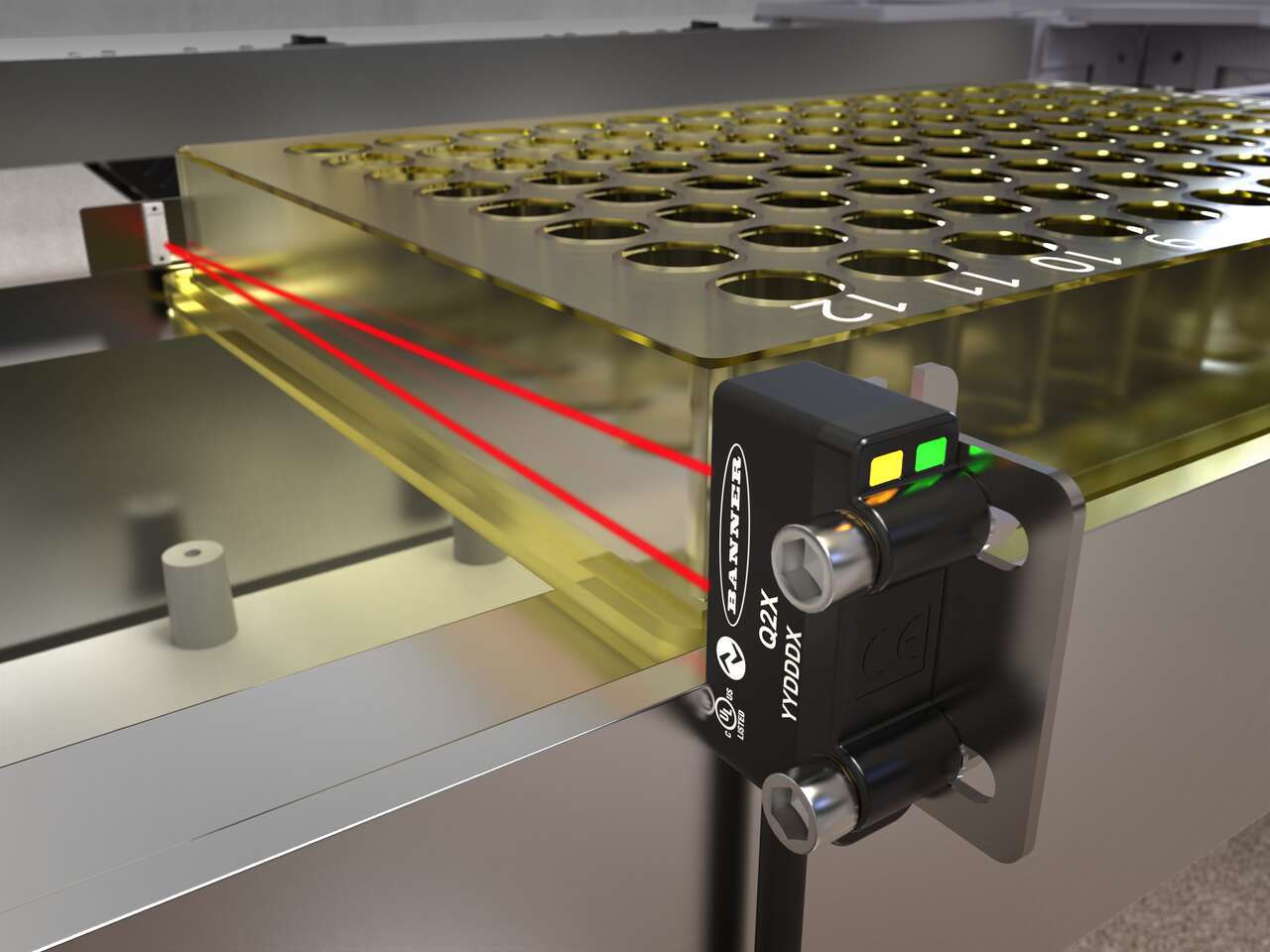
Image de la série  |
Nom de la série Q2X | Portée en mode barrière (m) 3 | Portée en mode rétroréflectif non polarisé (m) — | Portée en mode rétroréflectif polarisé (m) 3,3 | Portée en mode rétroréflectif polarisé laser (m) — | Portée en mode diffus (mm) — | Portée en mode suppression d’arrière-plan fixe (mm) 50 | Portée en mode suppression d’arrière-plan réglable (mm) 3000 | Type d'émetteur LED et Laser | Matériau du boîtier Plastique | Indice de protection IP67 | Temps de réponse (μs) 600-100 000 | Température de fonctionnement -25 à +50 °C | IO-Link ✅ OUI | Détection d'objets transparents ✅ OUI |






































Applications photoélectriques
-
Streamline Labeling Process with a Fixed-Field Sensor
-
Accurate Positioning in Medical & Scientific Laboratories
-
Dark Wafer Presence Detection
-

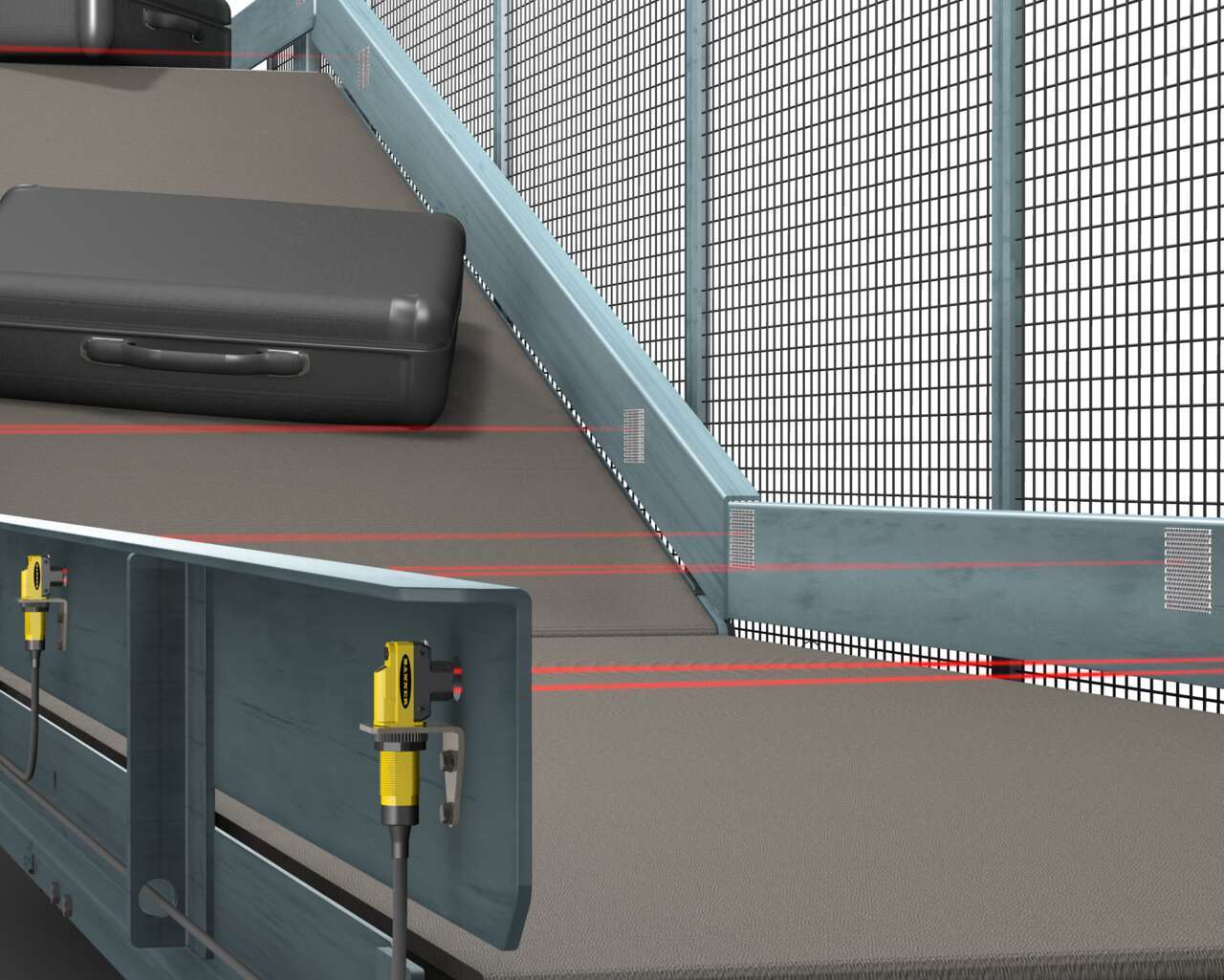
Preventing Jams in Airport Baggage Retrieval Systems
-

Status Indication on Airport Conveyor
-

Guidage lumineux des chariots élévateurs
-

Jam Detection on a Conveyor with Only AC Power
-

Détection fiable de bouteilles en plastique transparent sur un convoyeur
-
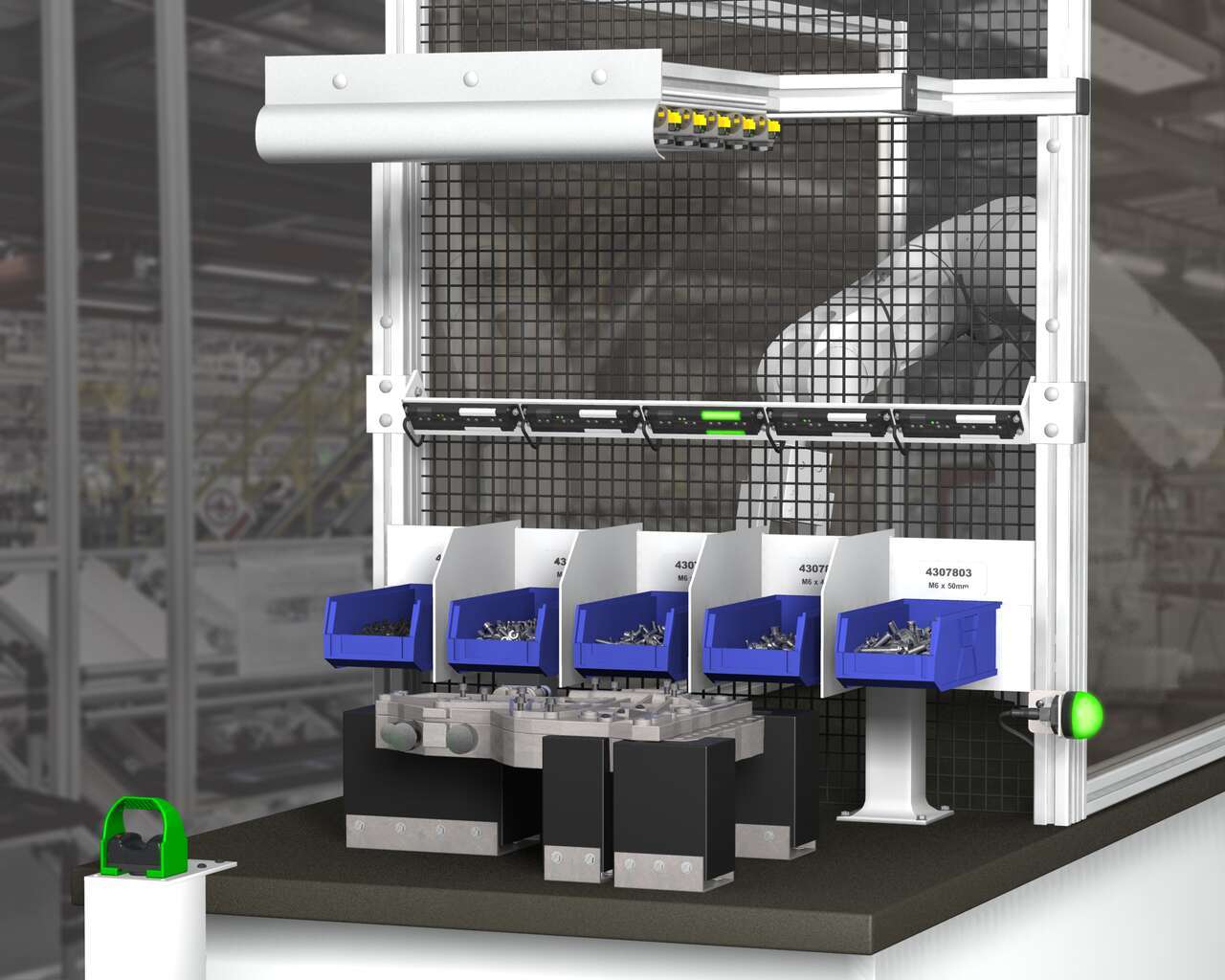
Solution de guidage de l'opérateur
-
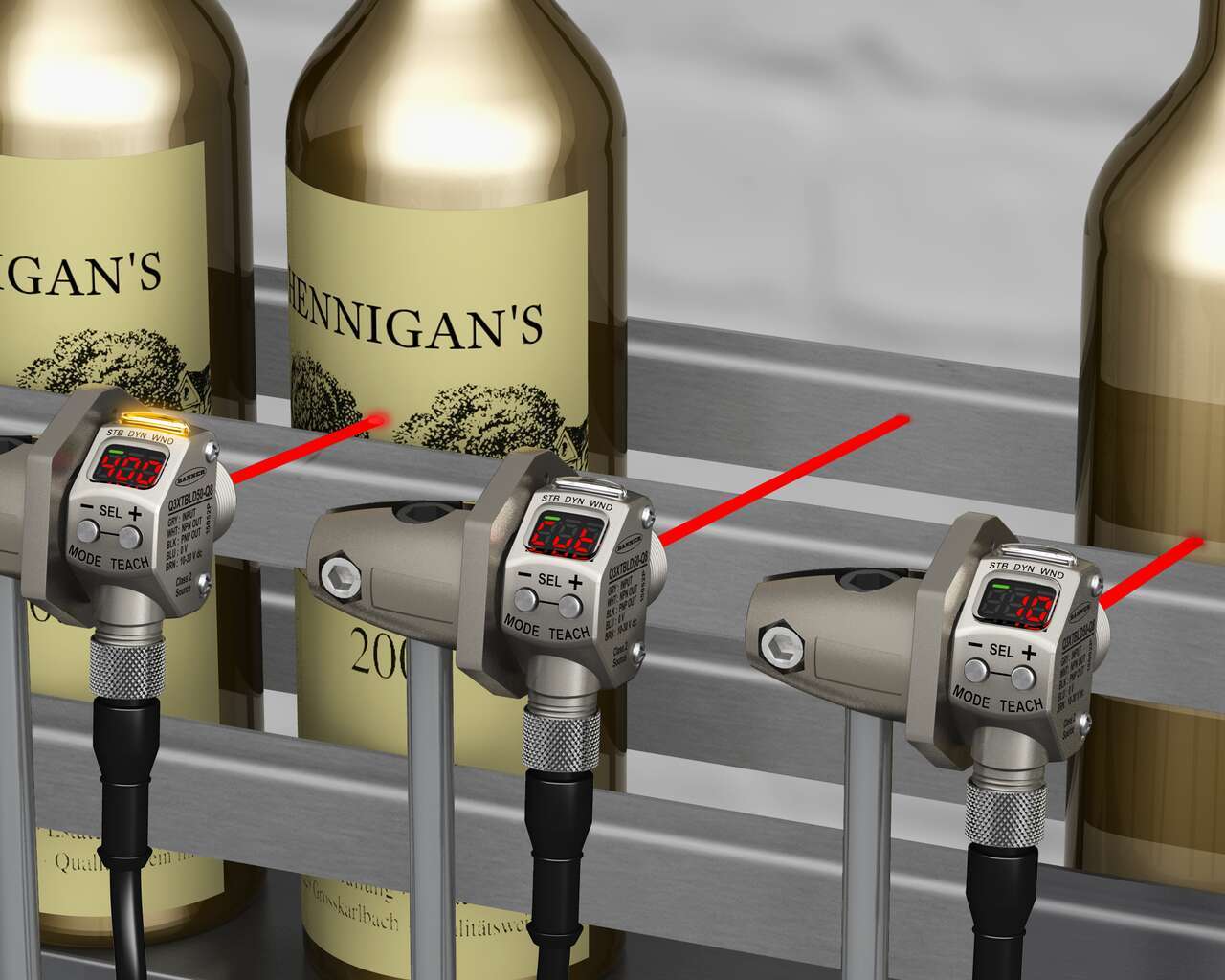
![Détection de bouteilles jaunes par un capteur à LED bleue [Exemple de réussite]](/content/dam/banner-engineering/3d-renders/application-notes/wcc-migration/2010/QS18LV-Solid-Dose-Pkng---Perscription-Vial-Detect.psd/jcr:content/renditions/cq5dam.web.1280.1280.jpeg)
Détection de bouteilles jaunes par un capteur à LED bleue [Exemple de réussite]
-
![Pose d'étiquettes à manchon rétractable à une cadence élevée [Exemple de réussite]](/content/dam/banner-engineering/3d-renders/application-notes/wcc-migration/2013/QS18VN6LLPQ5-Shrink-Sleeve-Bottle-Labeling.psd/jcr:content/renditions/cq5dam.web.1280.1280.jpeg)
Pose d'étiquettes à manchon rétractable à une cadence élevée [Exemple de réussite]
-

Hauteur d'empilage des étuis en carton
-
Mesure de niveau
-
Détection de caractéristiques longue portée
-
Comptage des cartes mémoire
-

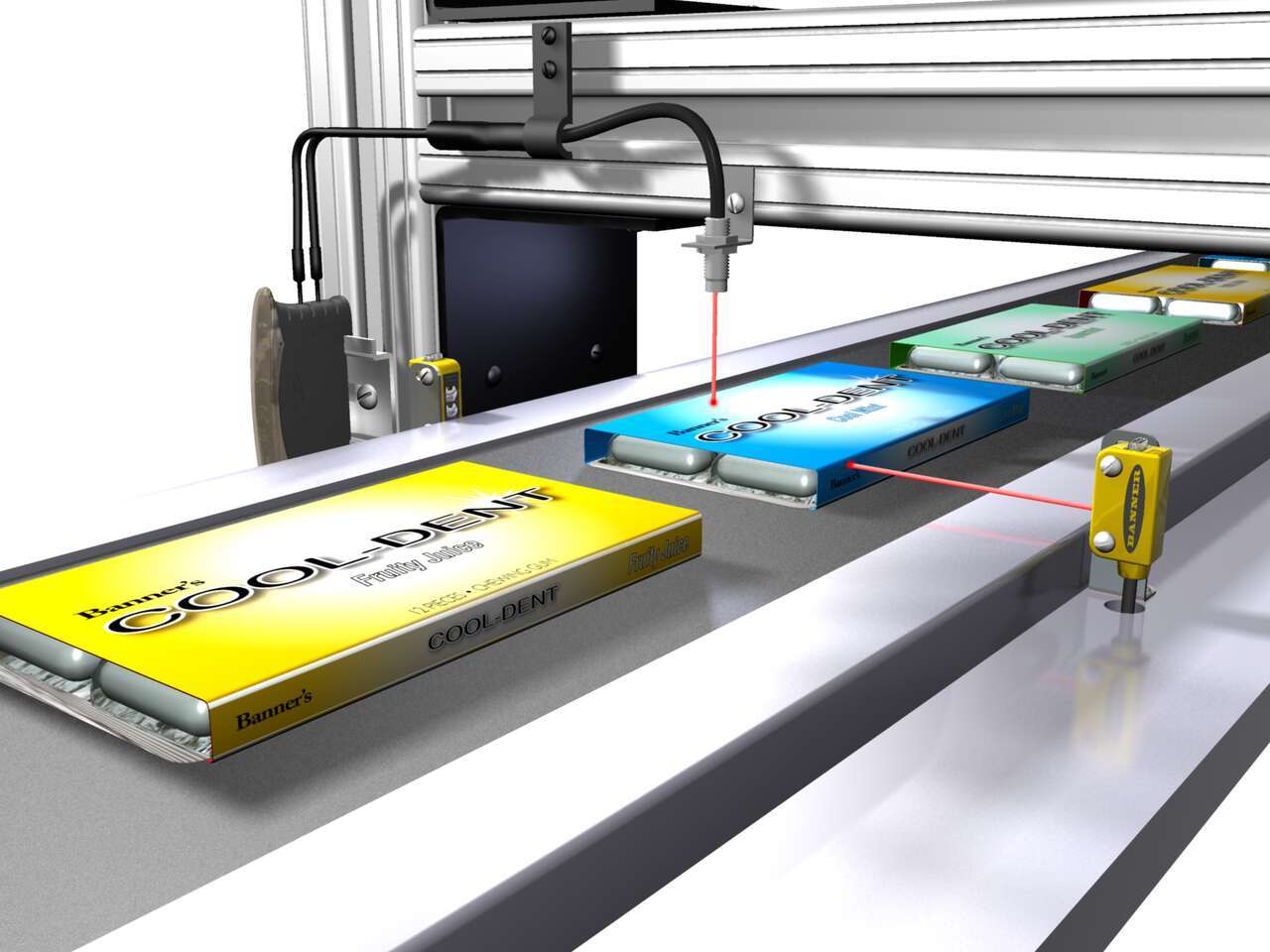
Détection de boîtes de jus
-
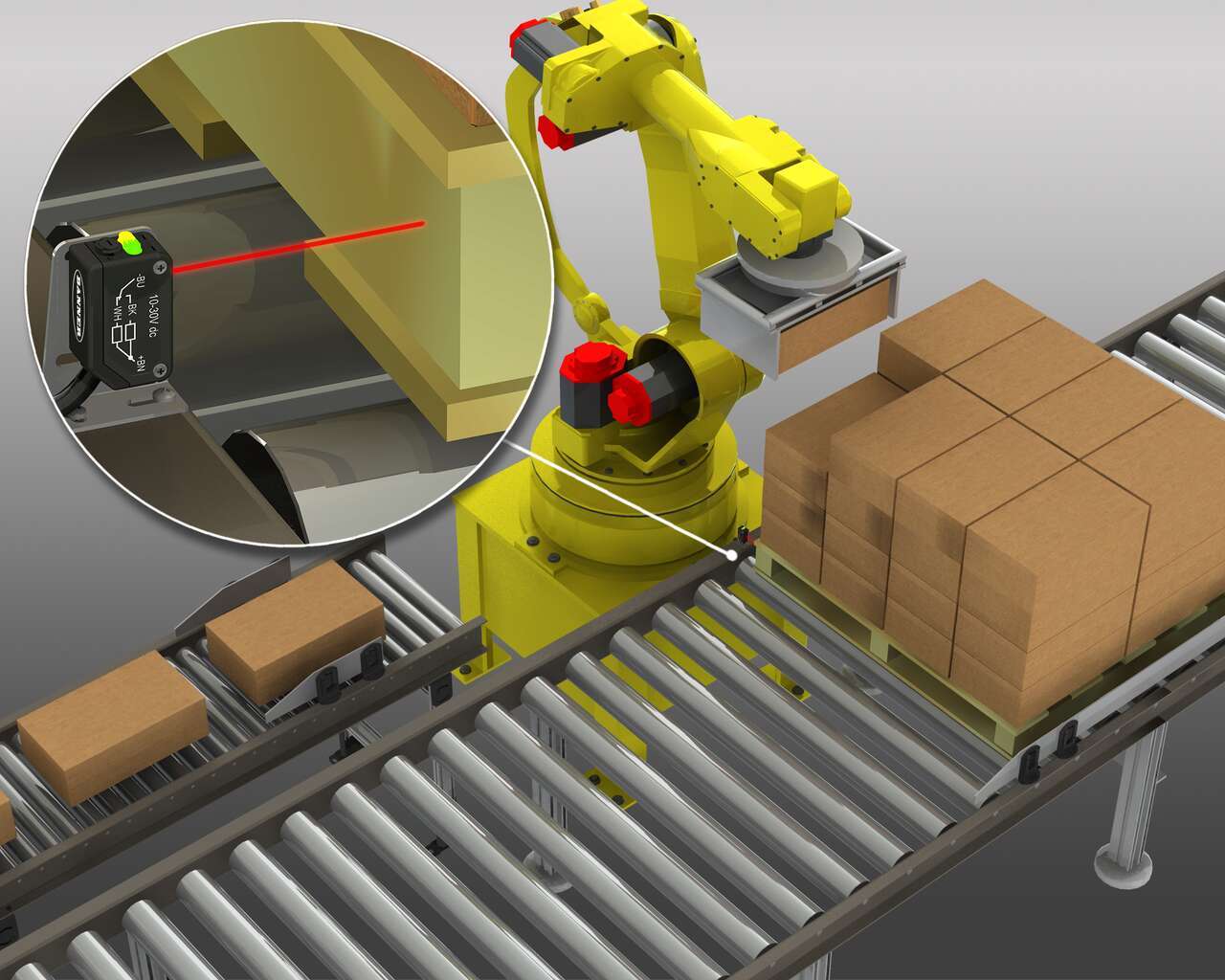
Load Station Pallet Detection
-

Surveillance de film transparent dans une thermoscelleuse
-

Évitement de collisions de colis
-
Position de bacs dans un multishuttle
-
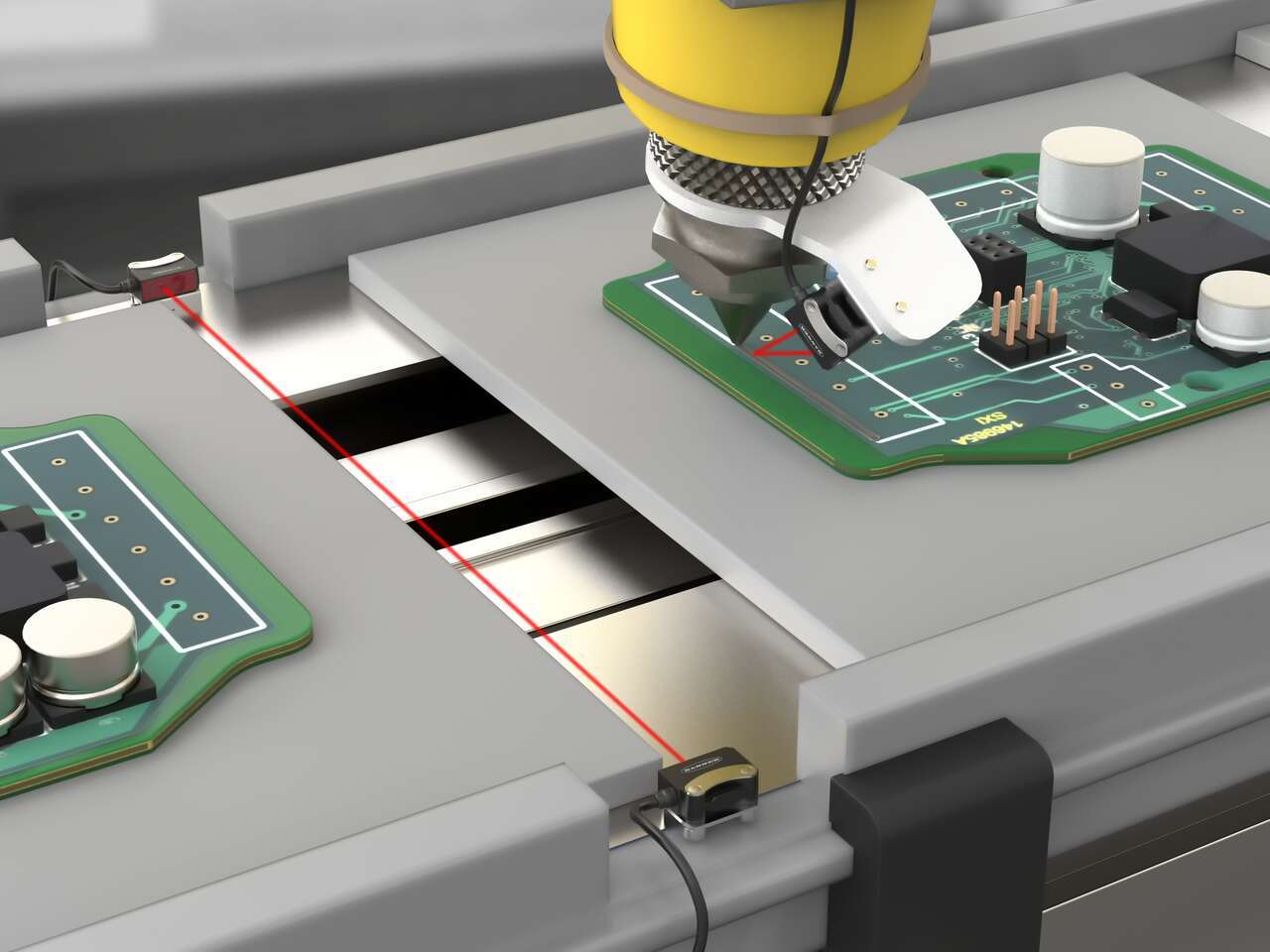
Détection de colle sur les circuits imprimés lors de leur assemblage
-
Détection des joints toriques noirs
-
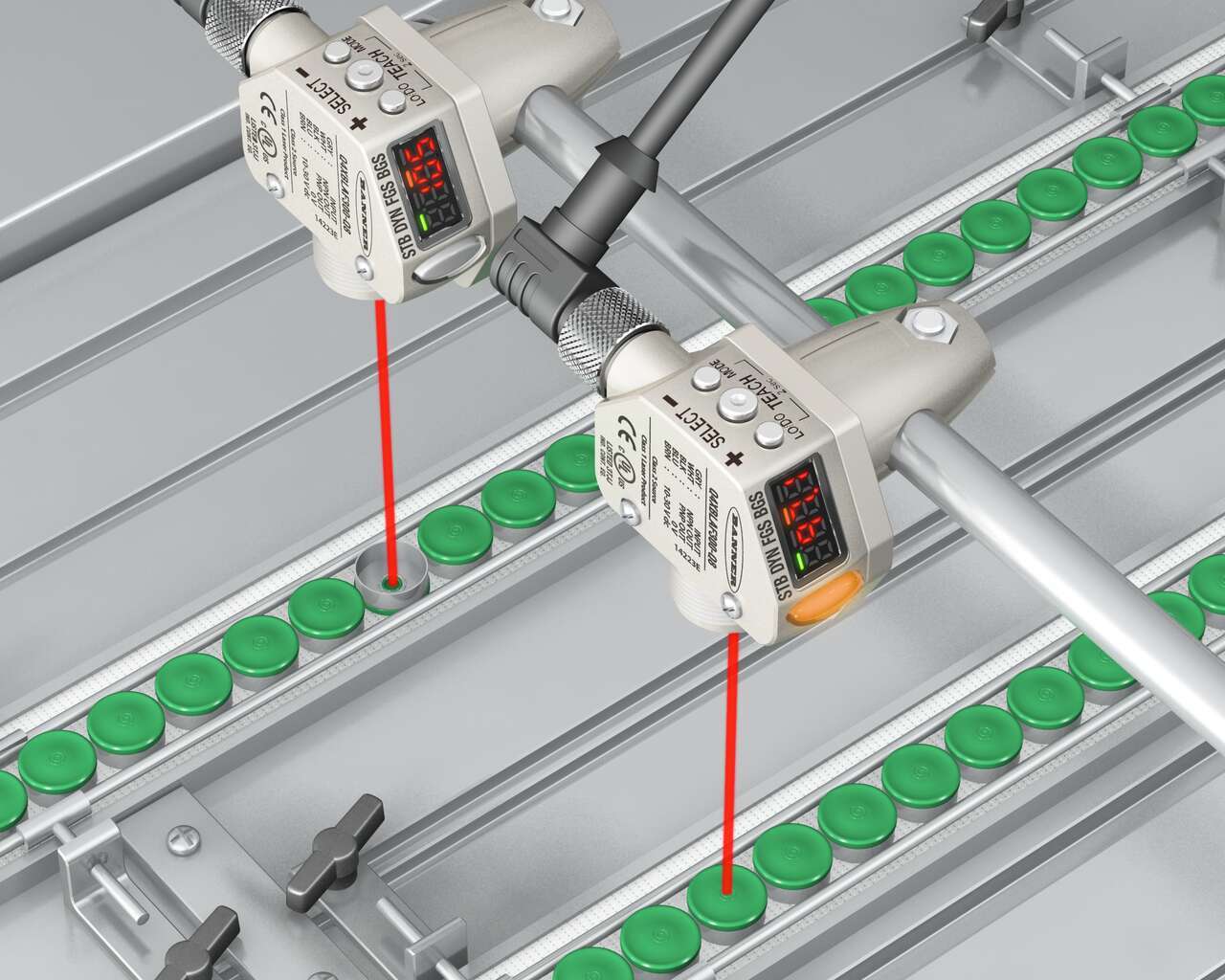
Vérification de l'orientation des bouchons
-
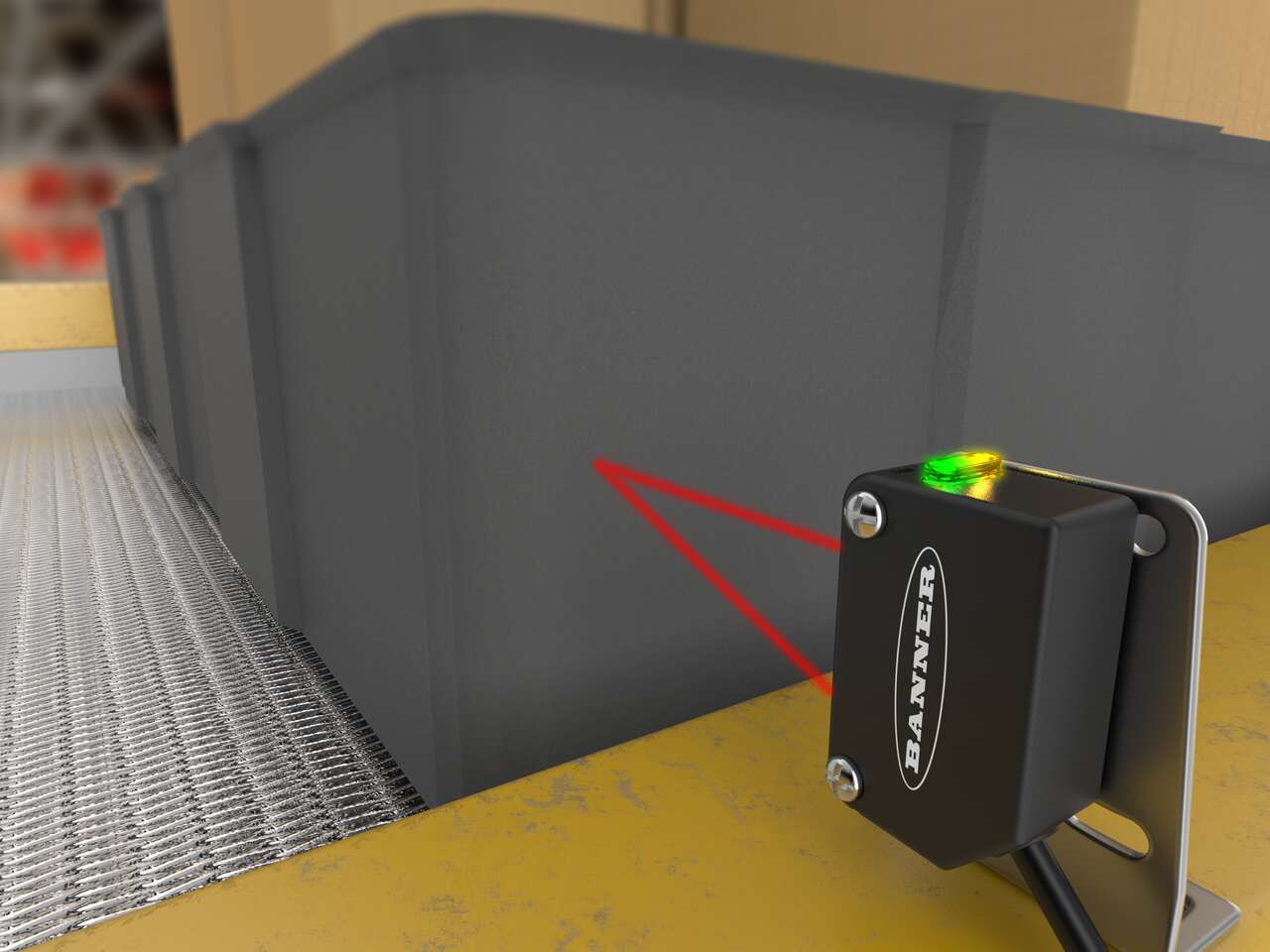
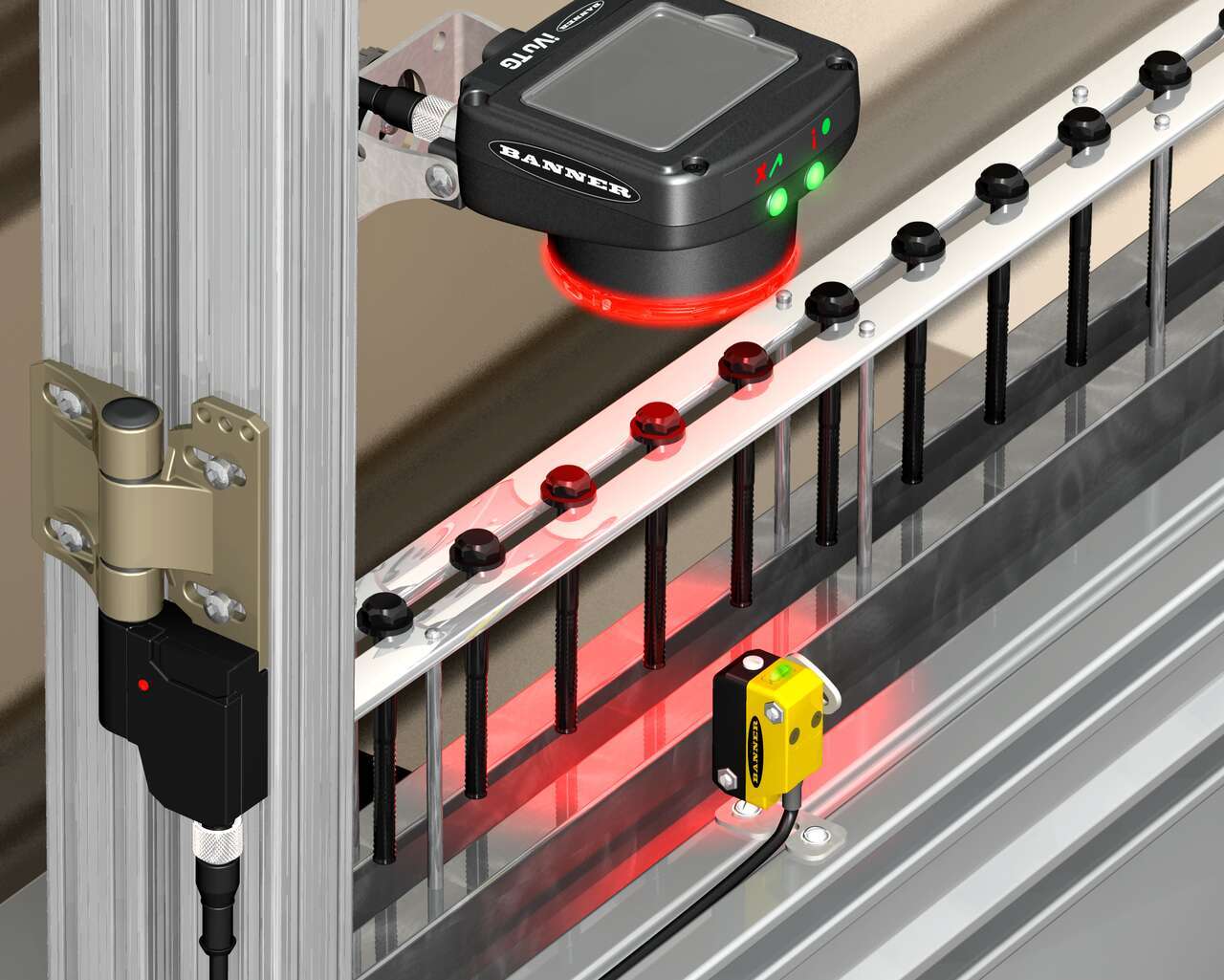
Détection de pièces noires sur des panneaux de porte noirs
-
Détection de petits pains réfrigérés sur un convoyeur multivoie
-
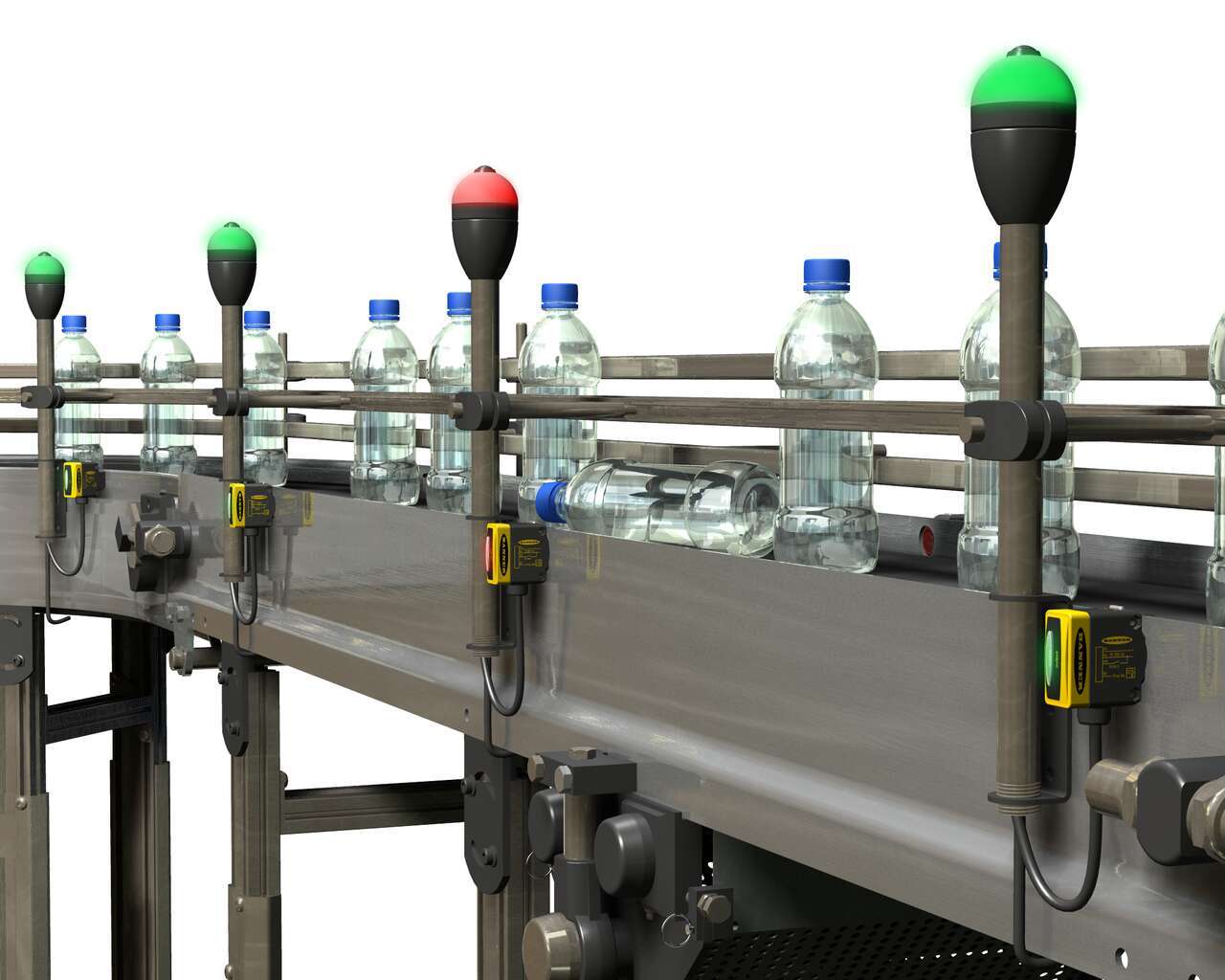
Détection et indication de la présence d'une bouteille renversée
-

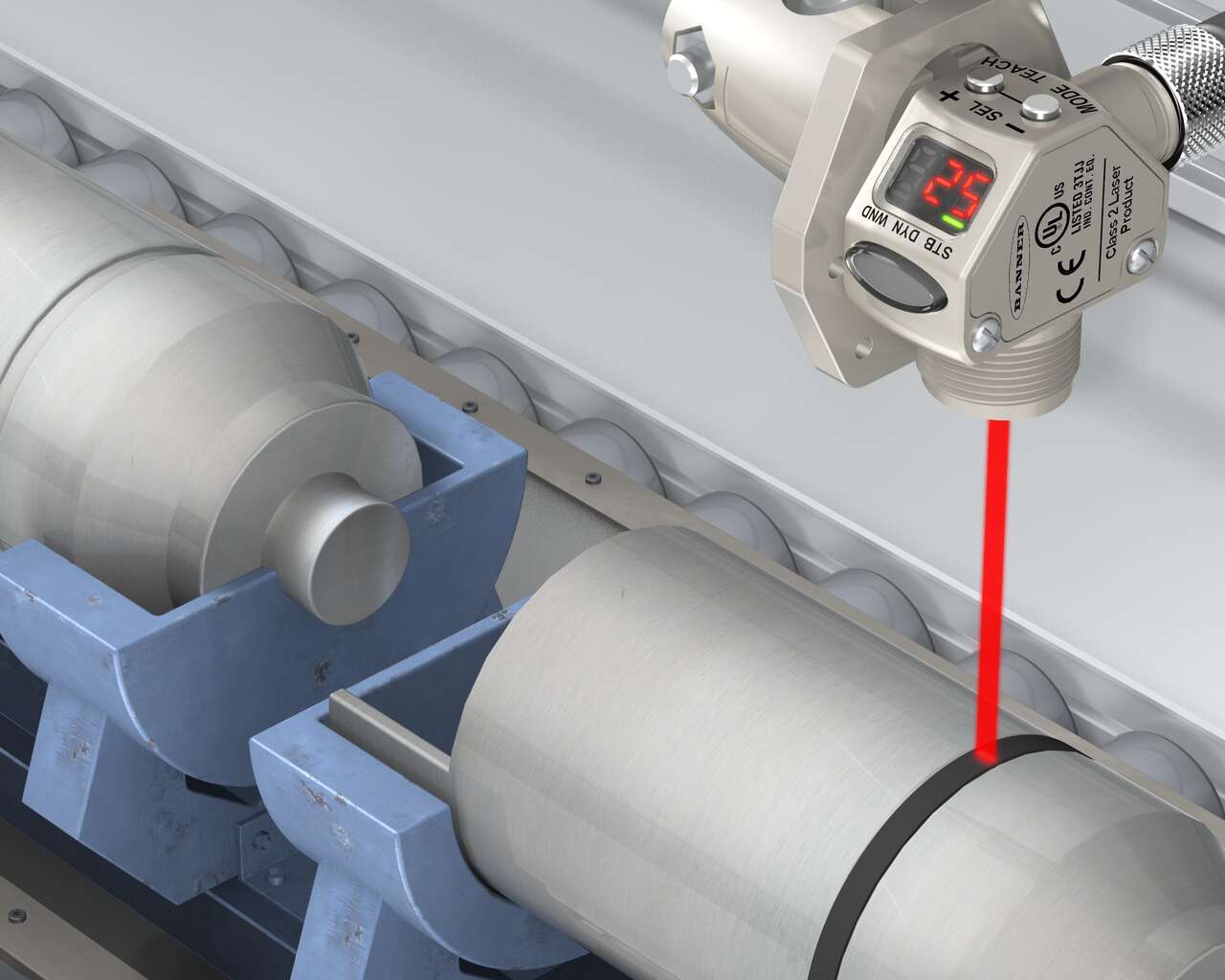
Comptage d'anneaux réfléchissants
-
Accumulation en file indienne sur une seule aligneuse
-

Indication de blocage de la glissière
-
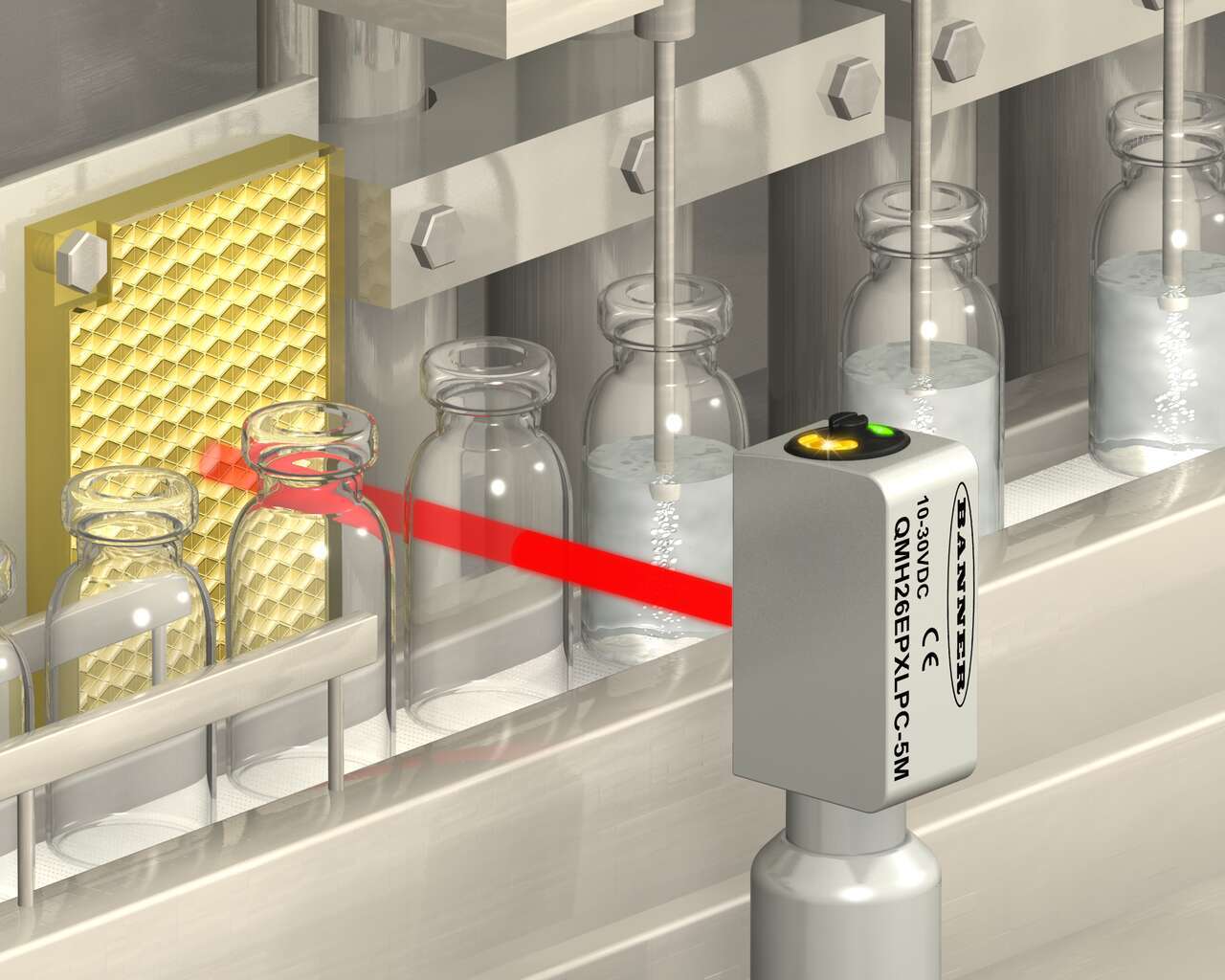
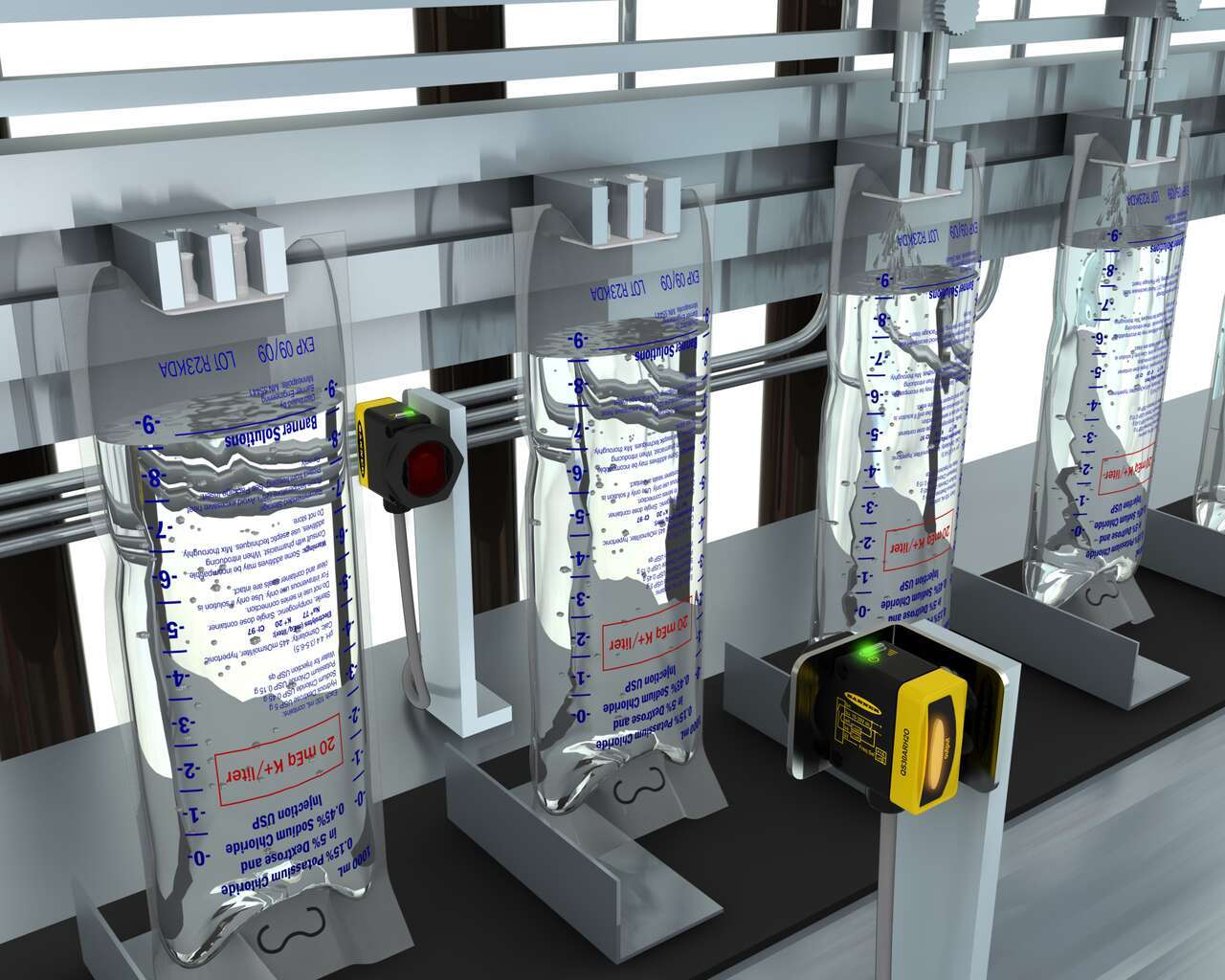
Détection du niveau de remplissage des flacons
-

Surveillance des niveaux de barquettes en plastique sur une désempileuse
-
Manutention des bagages
-

Impression de code de lot/date déclenchée par la détection d'un carton
-
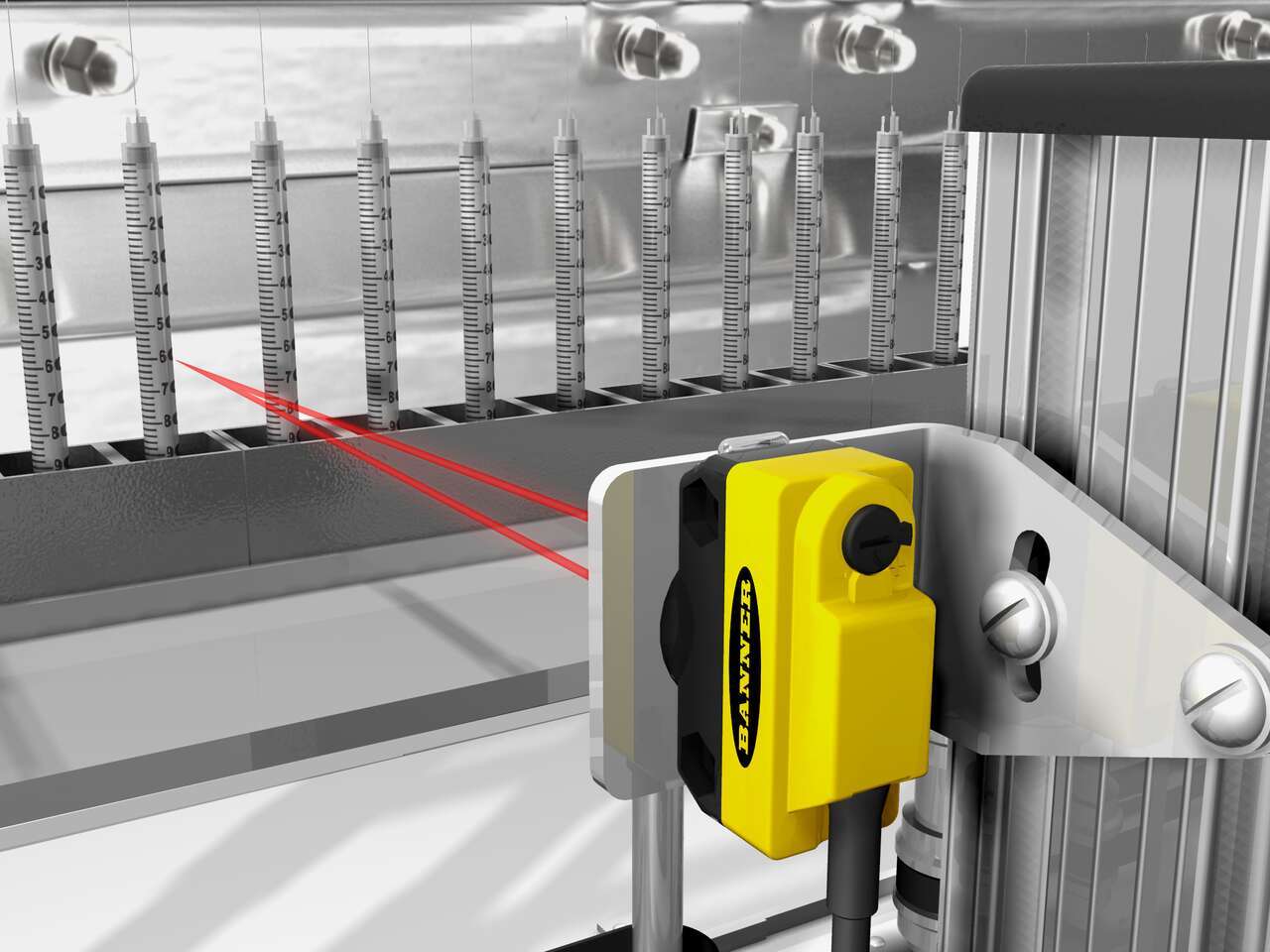
Comptage de seringues à l'aide de la suppression d’arrière-plan
-
Détection de boîtes de différentes tailles sur un convoyeur
-

Détection d'éléments sur un convoyeur alimenté en courant alternatif
-

Détection de flacons de médicaments avant remplissage
-
Détection de la hauteur d'une pile de pièces métalliques
-

Inspection de boîtes à l'aide de détecteurs laser en mode diffus
-
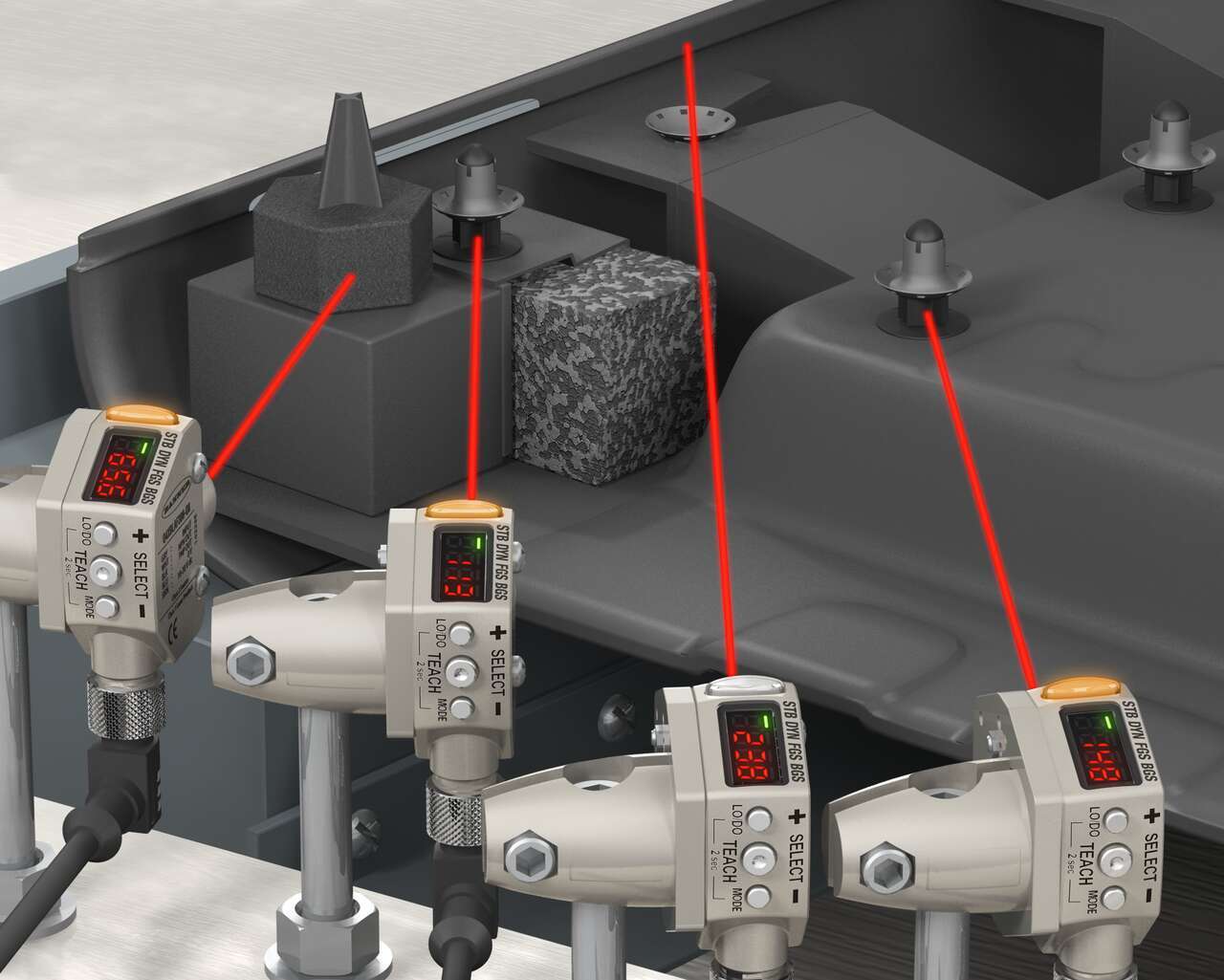
Détection de rondelles de caoutchouc sur un bloc moteur
-
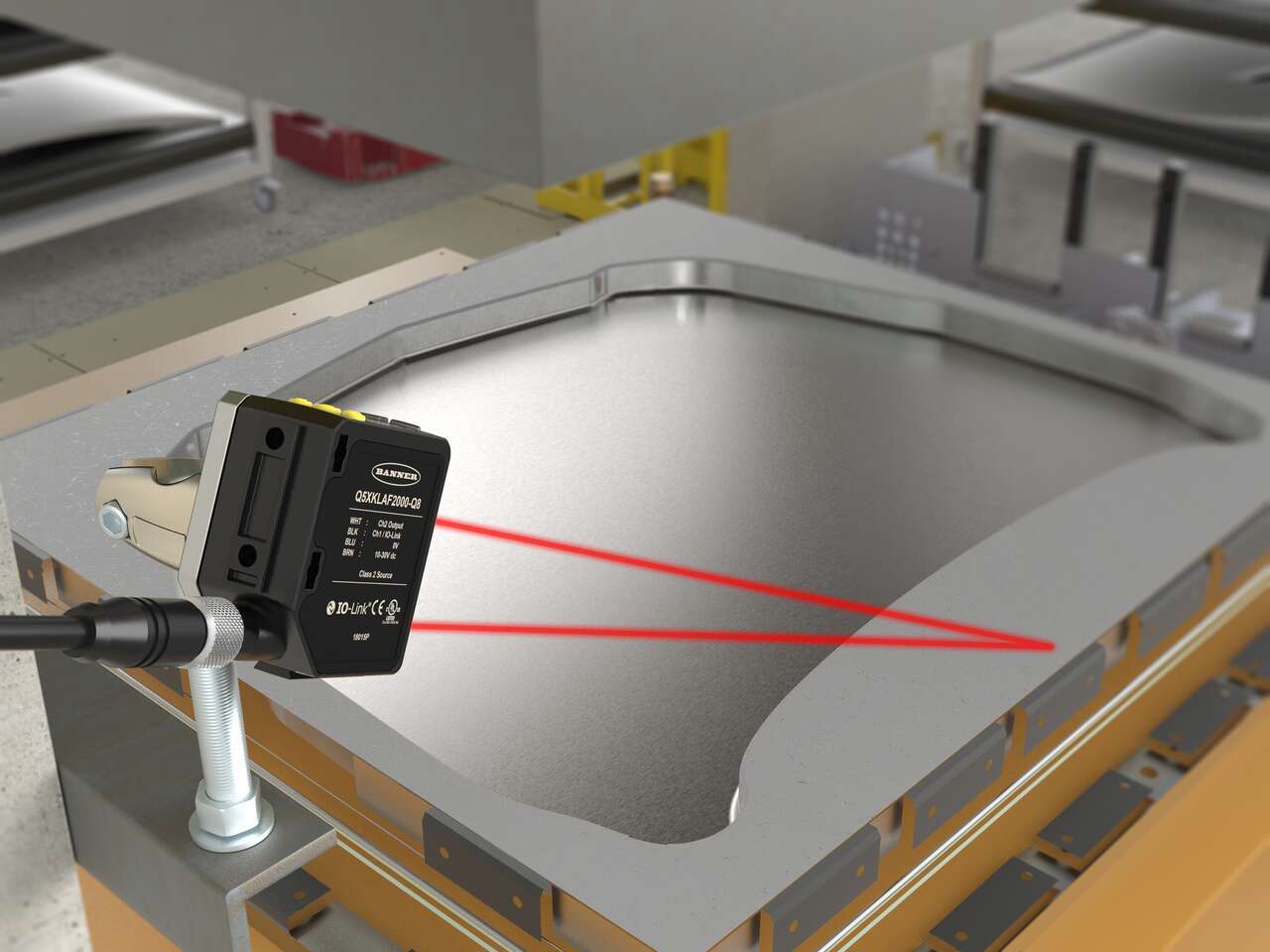
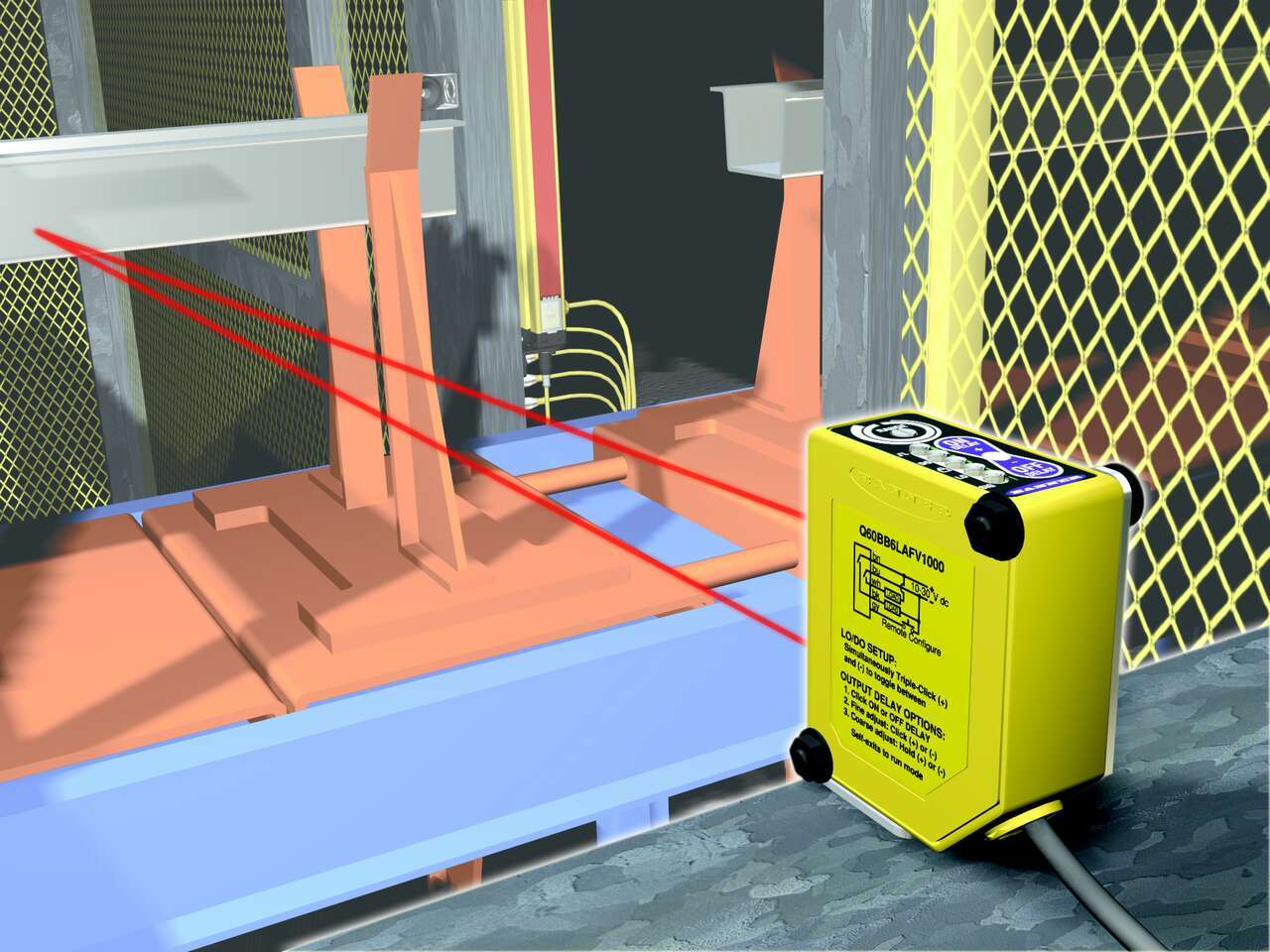
Vérification des tôles sur une presse à emboutir
-

Détection de bouteilles renversées sur une ligne d'embouteillage haute vitesse
-
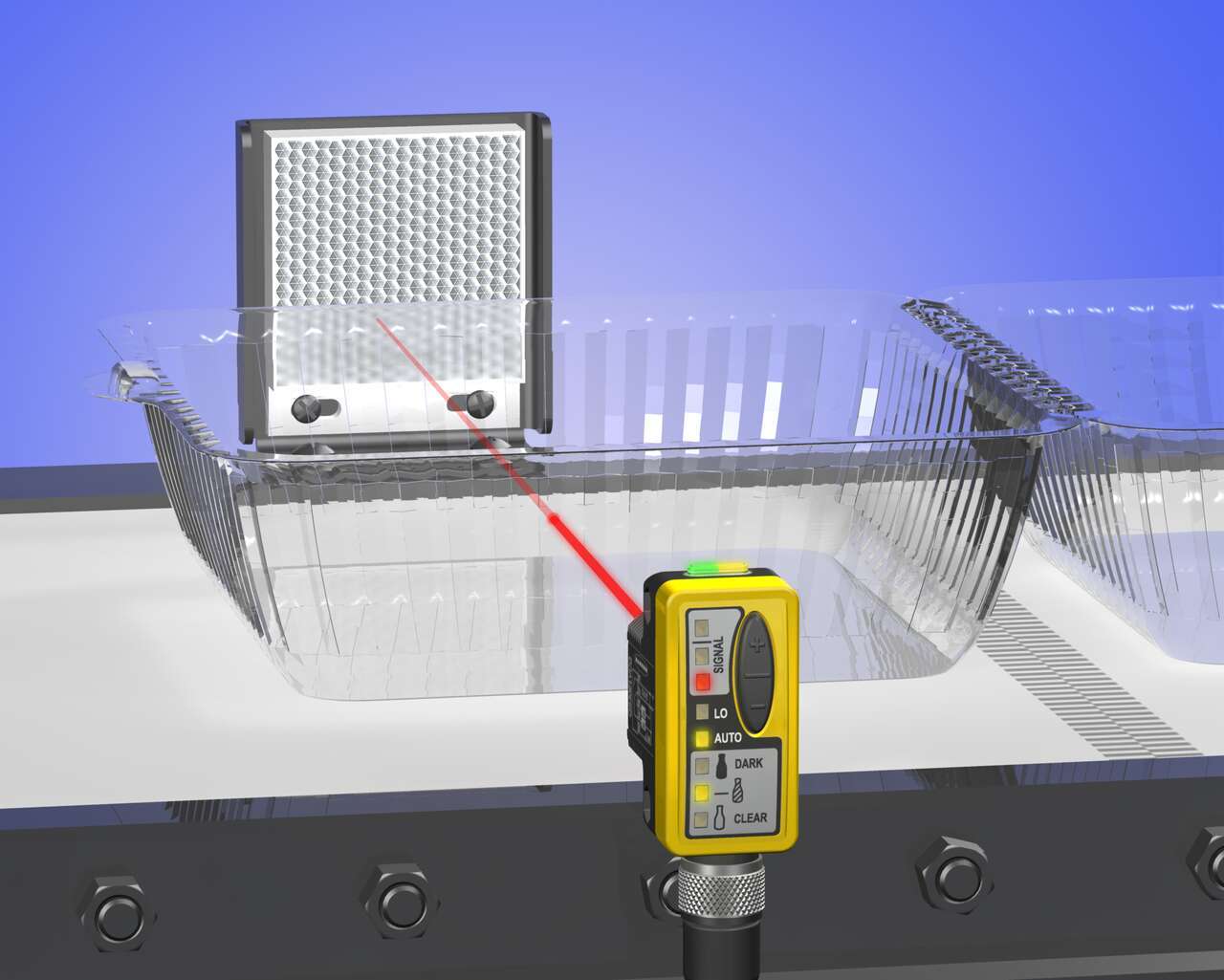
Comptage de barquettes en plastique transparent sur un convoyeur
-
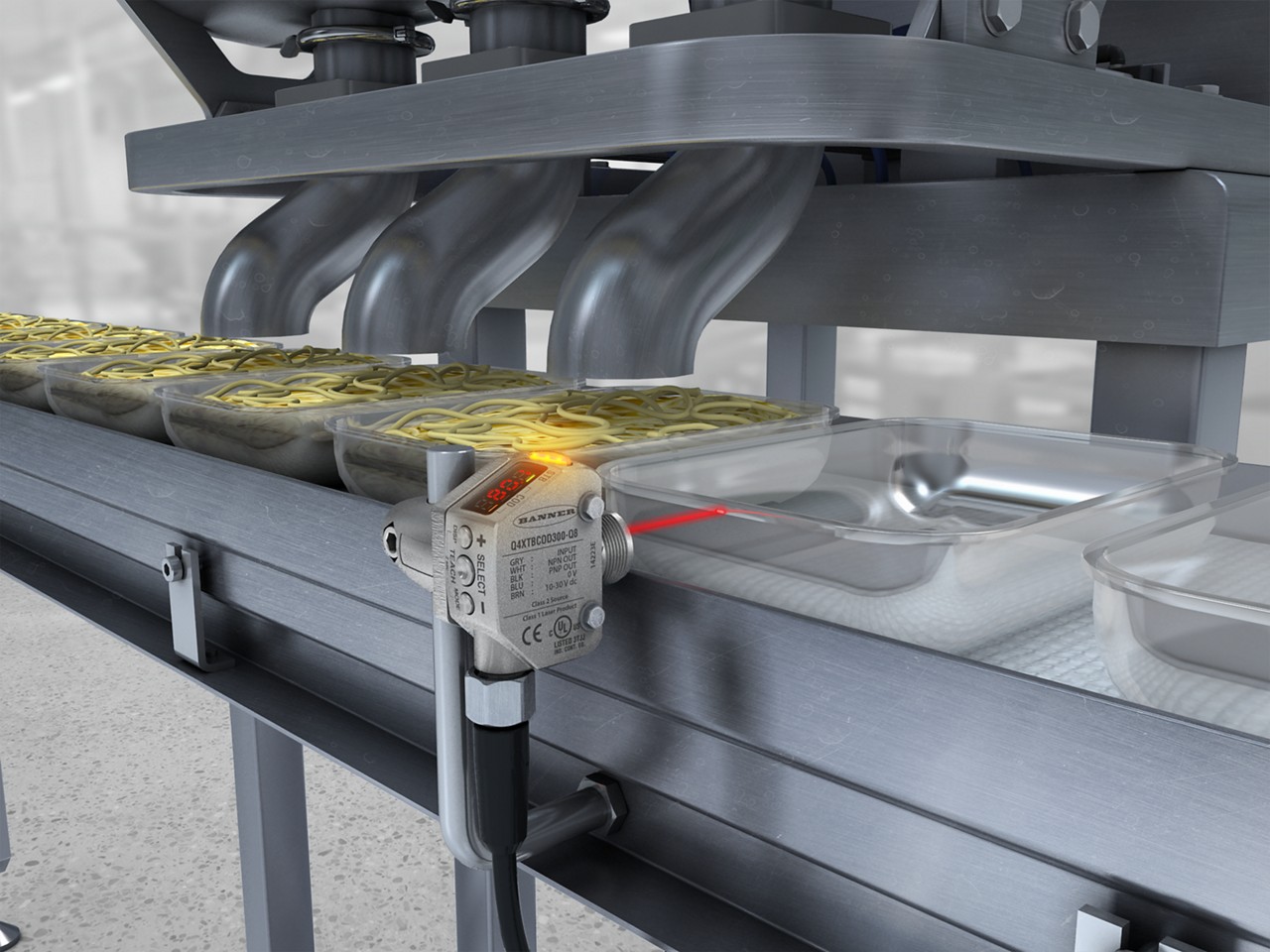
Détection de barquettes transparentes à un poste de distribution et remplissage
-
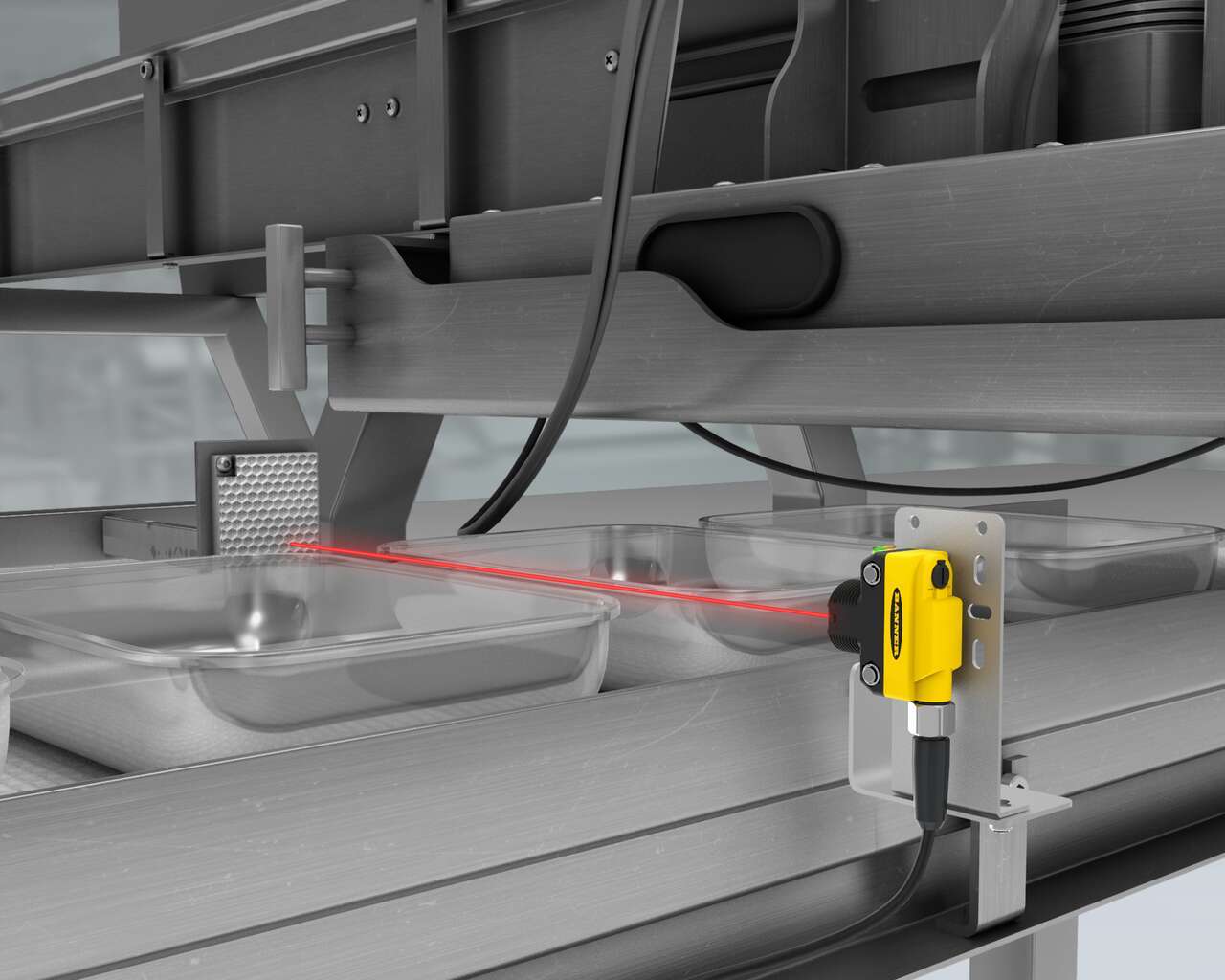
Contrôle de la pression de la ligne de barquettes alimentaires transparentes au niveau de la désempileuse
-

Cibles sombres et peu contrastées
-

Détection des bouteilles en verre ou en plastique PET transparent dans les environnements Washdown
-

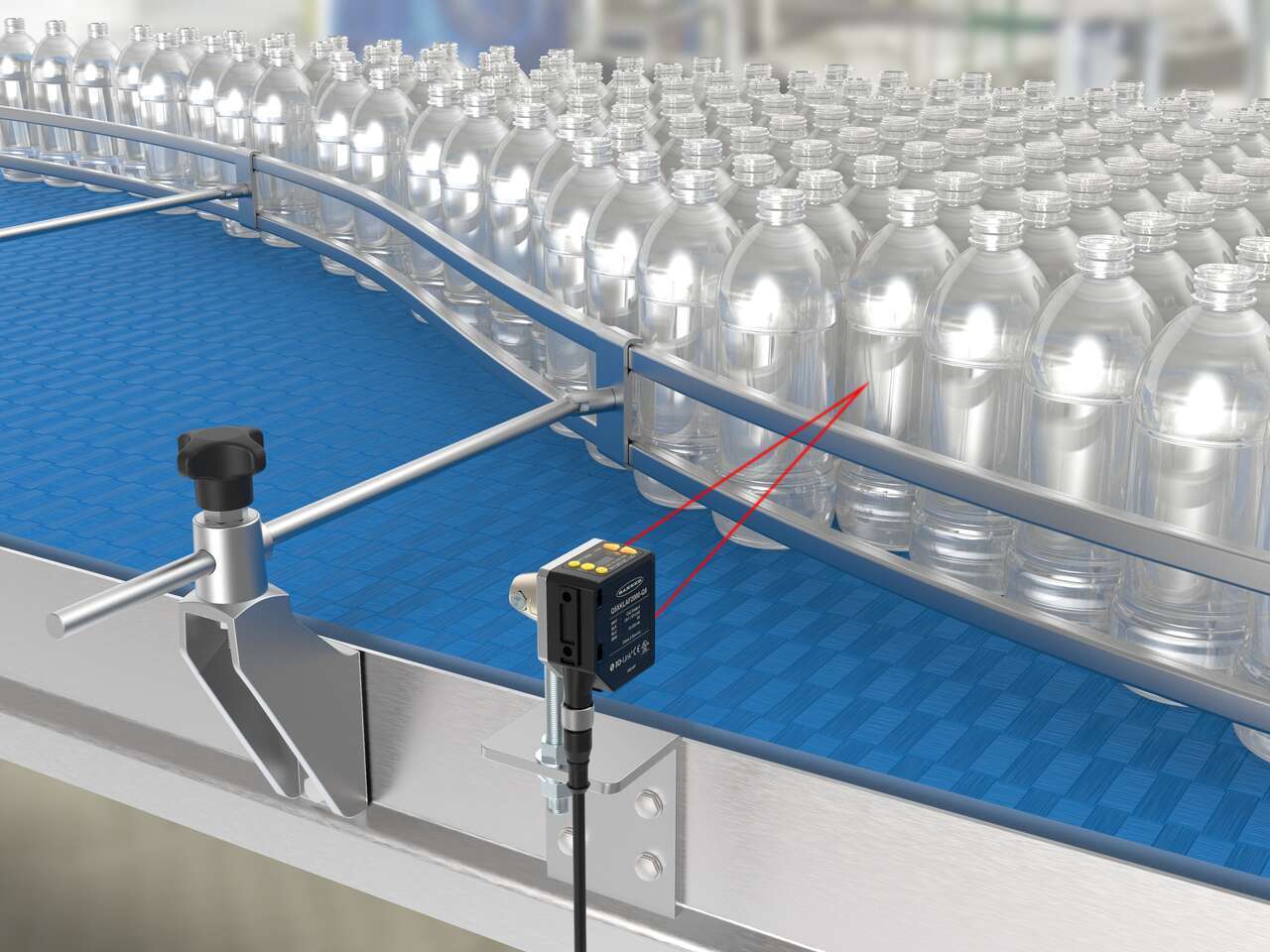
Détection des bouteilles en PET pour réguler le flux des produits
-
Détection de bouteilles transparentes dans un environnement washdown
-

Vérification de niveau de remplissage sans contact
-
Solutions pour ensacheuse verticale
-
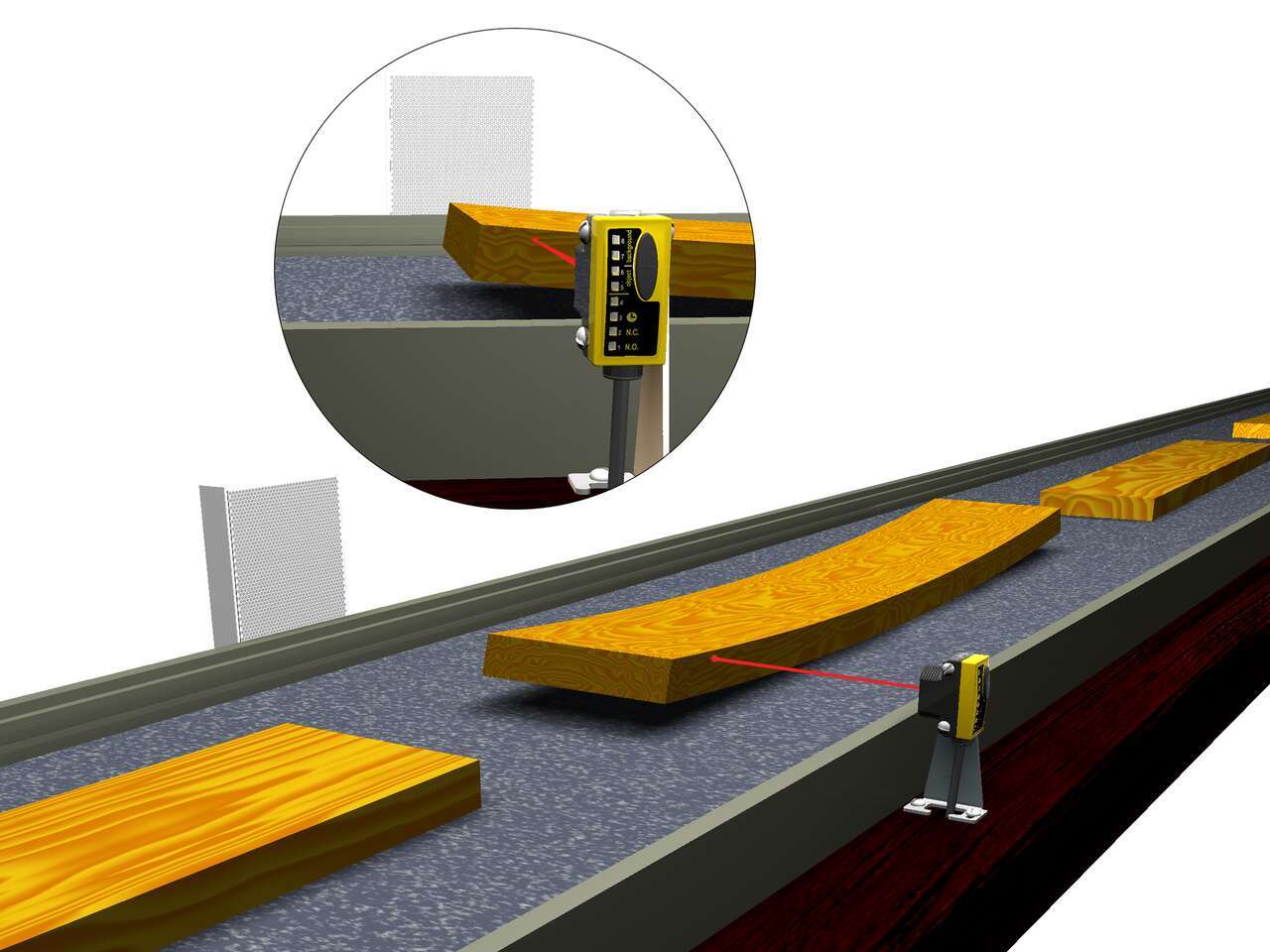
Détection d'une déformation d'une planche avec un capteur QS30
-

Détection d'un blocage sur le convoyeur
-
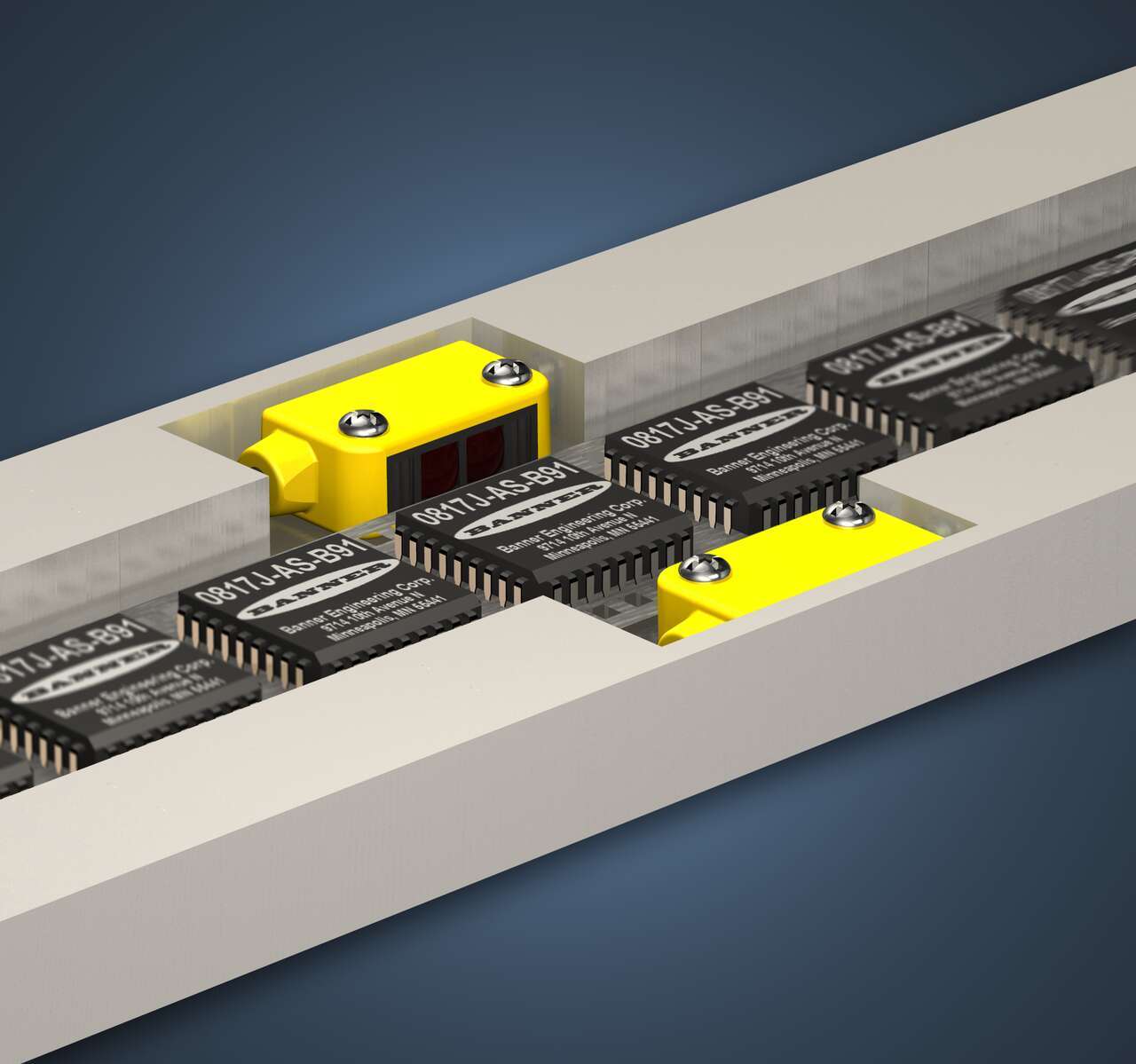
Comptage des circuits intégrés
-

Convoyeur extensible
-

Vérification du niveau de remplissage des bouteilles d'eau
-
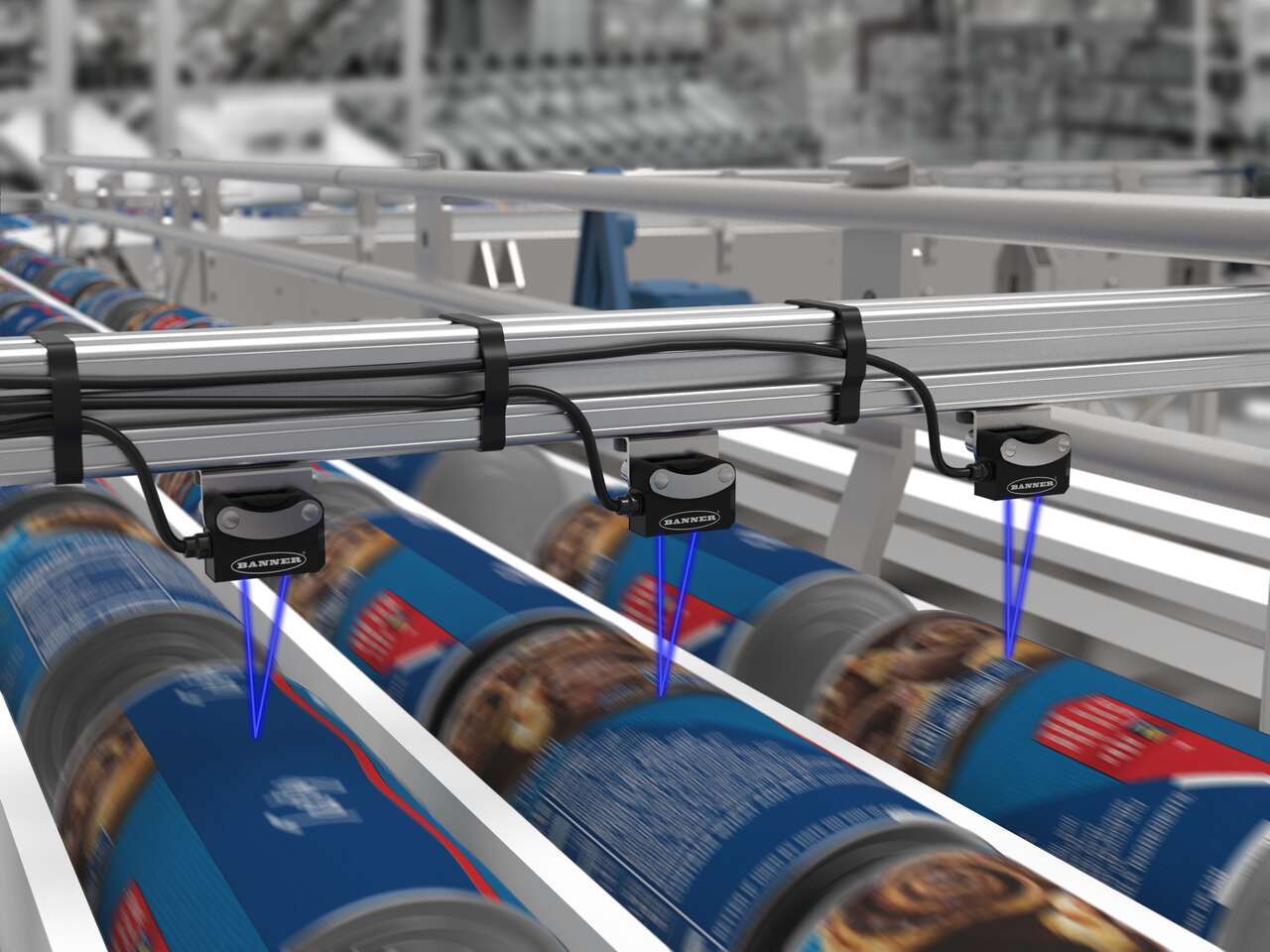
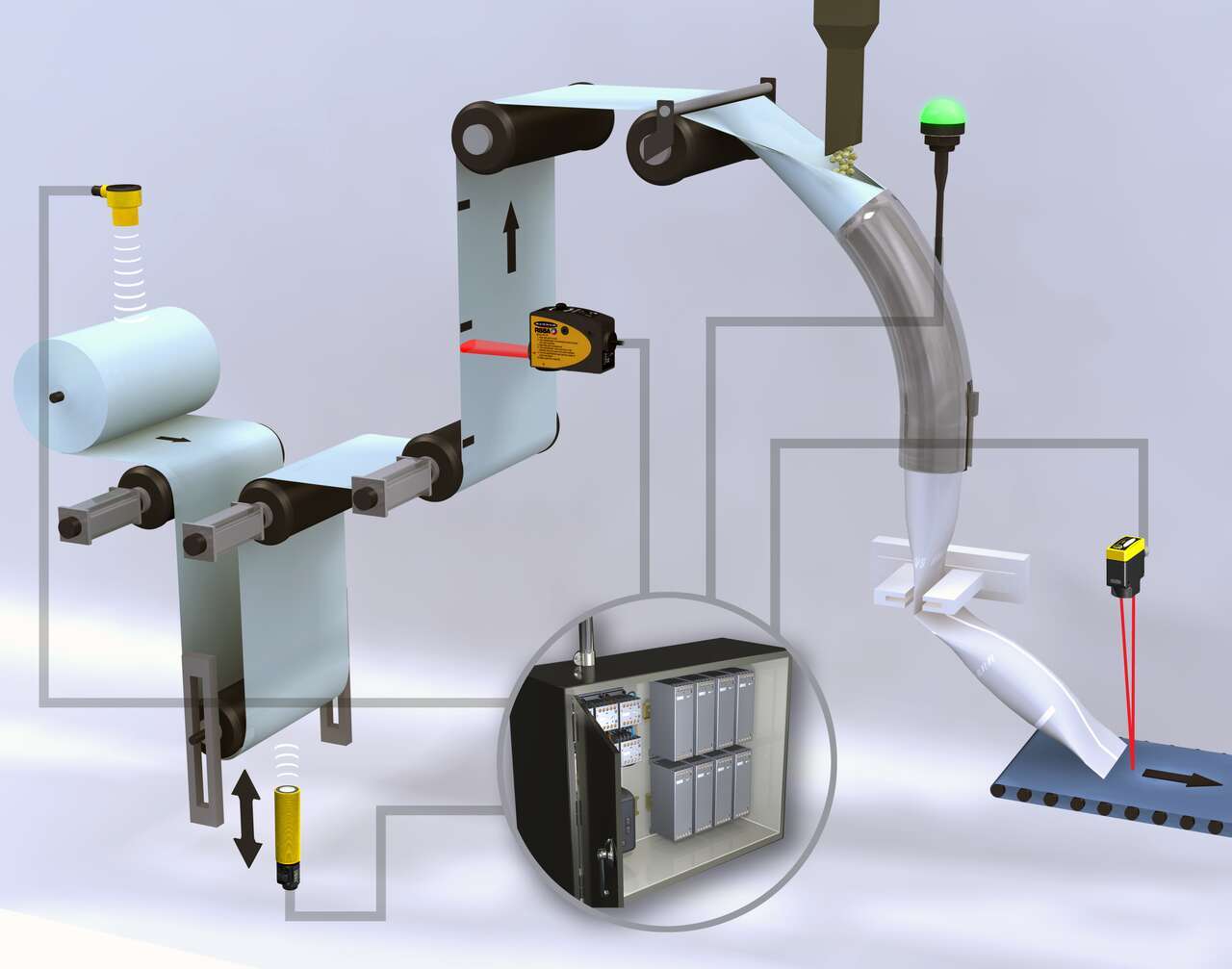
Déclenchement d'inspection lors de l'impression
-

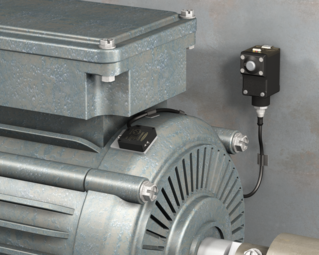
Détection de moteurs
-

Détection de pièces dans un bol vibrant
-

Détection de barquettes en plastique noir à un poste de distribution et remplissage
-

Inspection de capsules dans des espaces confinés
-
Détection de l'orientation des bouchons
-

Détection de disques durs
-

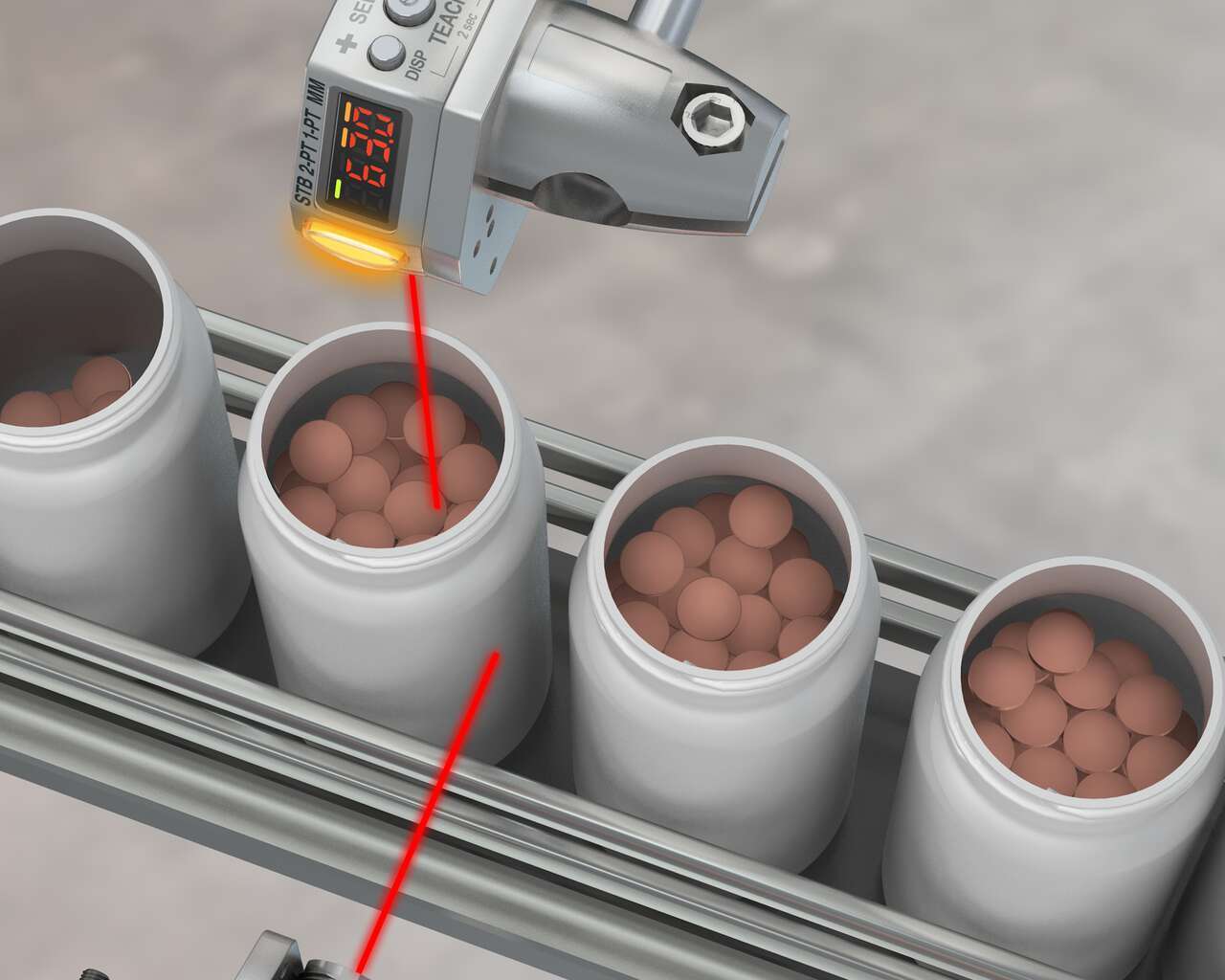
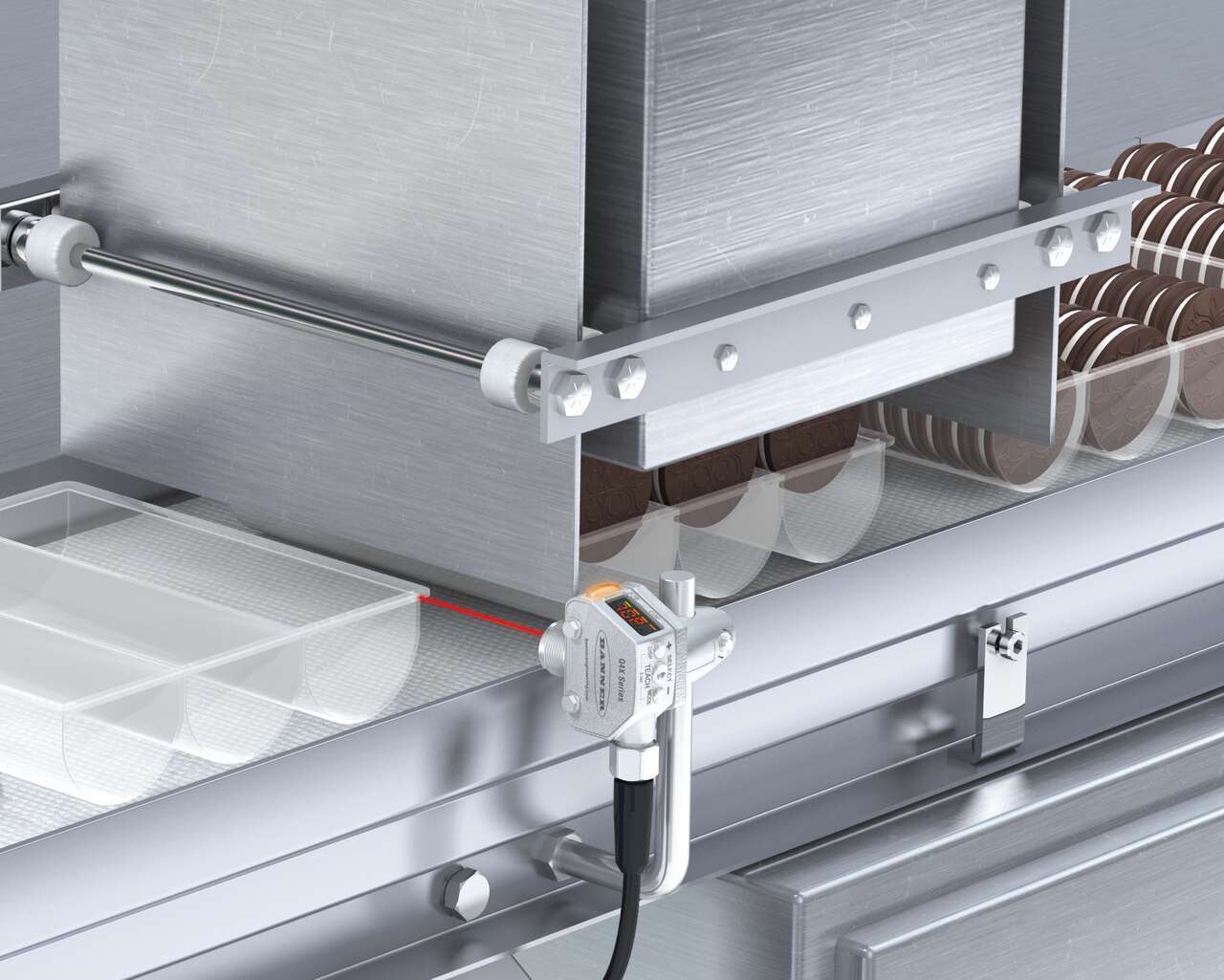
Contrôle de l'absence de pralines sur une ligne de conditionnement
-

Détection de la présence d'une étiquette
-

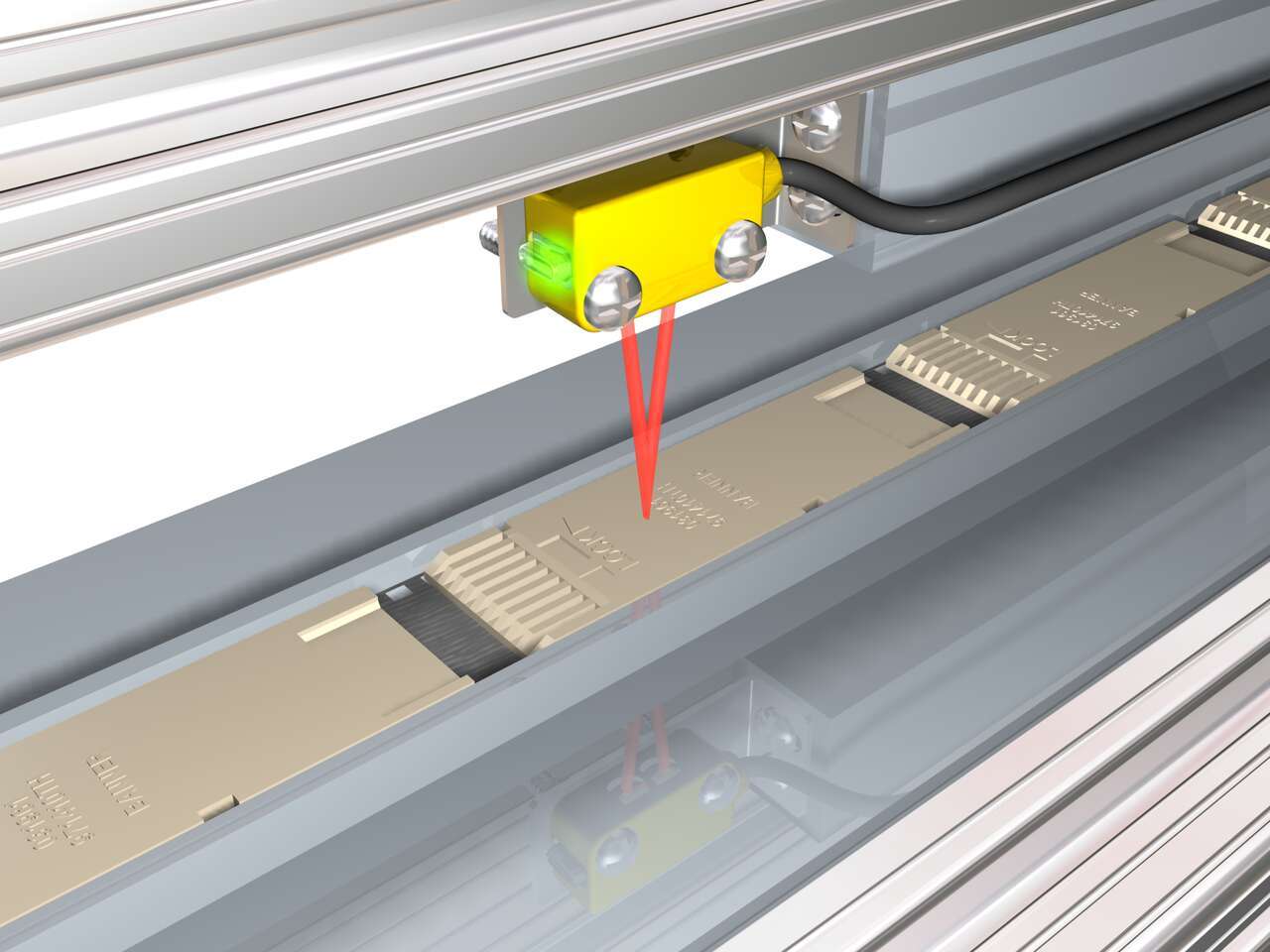
Contrôle qualité des puces électroniques déposées dans les pochettes d'une bande alvéolée
-
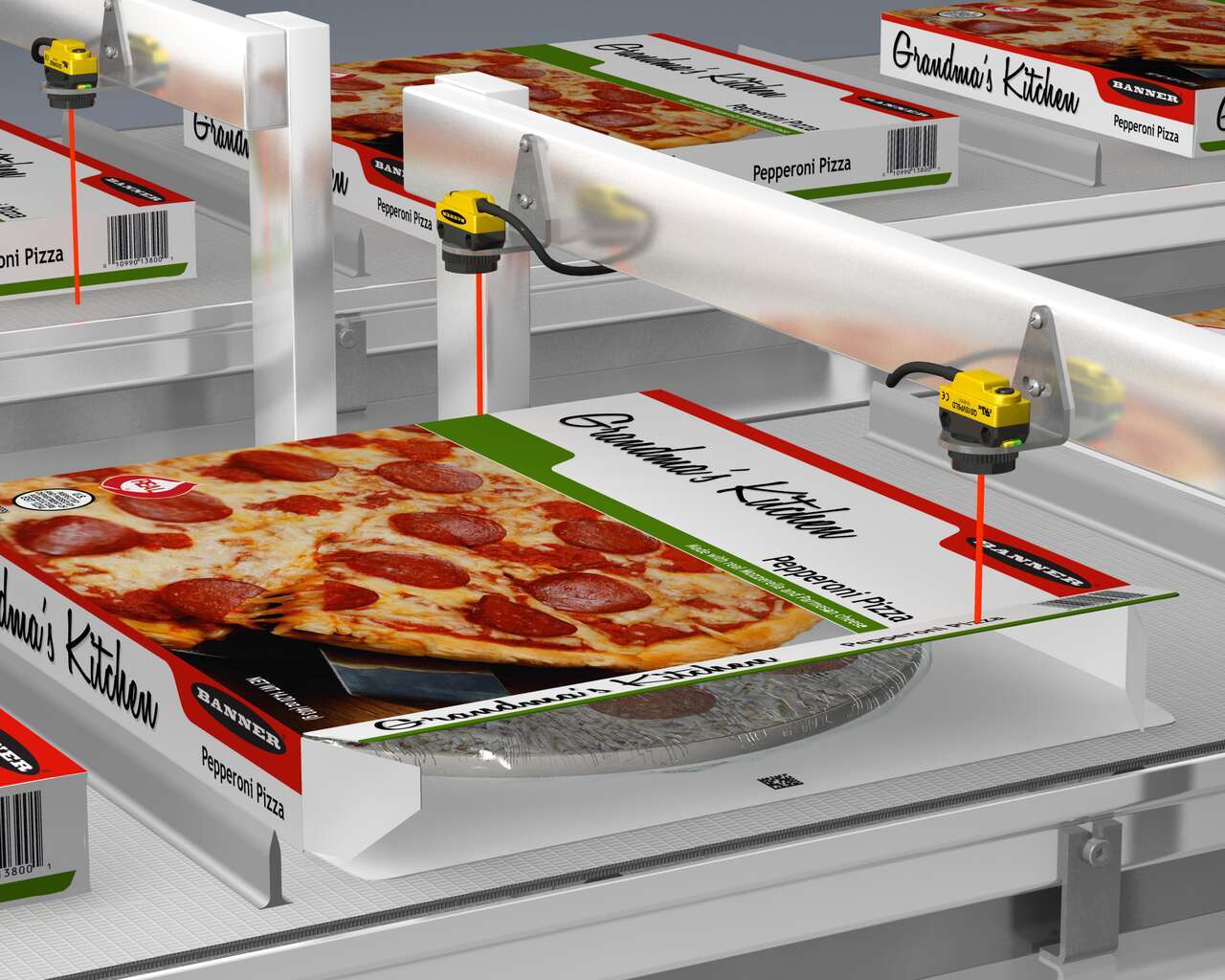
Détection des rabats sur les plats surgelés emballés
-
Capteurs aseptiques pour la détection de flacons en verre dans un environnement exposé aux produits chimiques corrosifs
-
Détection de liquides transparents dans des conditionnements transparents
-
Vérification des étiquettes des bouteilles
-

Comptage des emballages en carton
-
Tri de couleurs
-
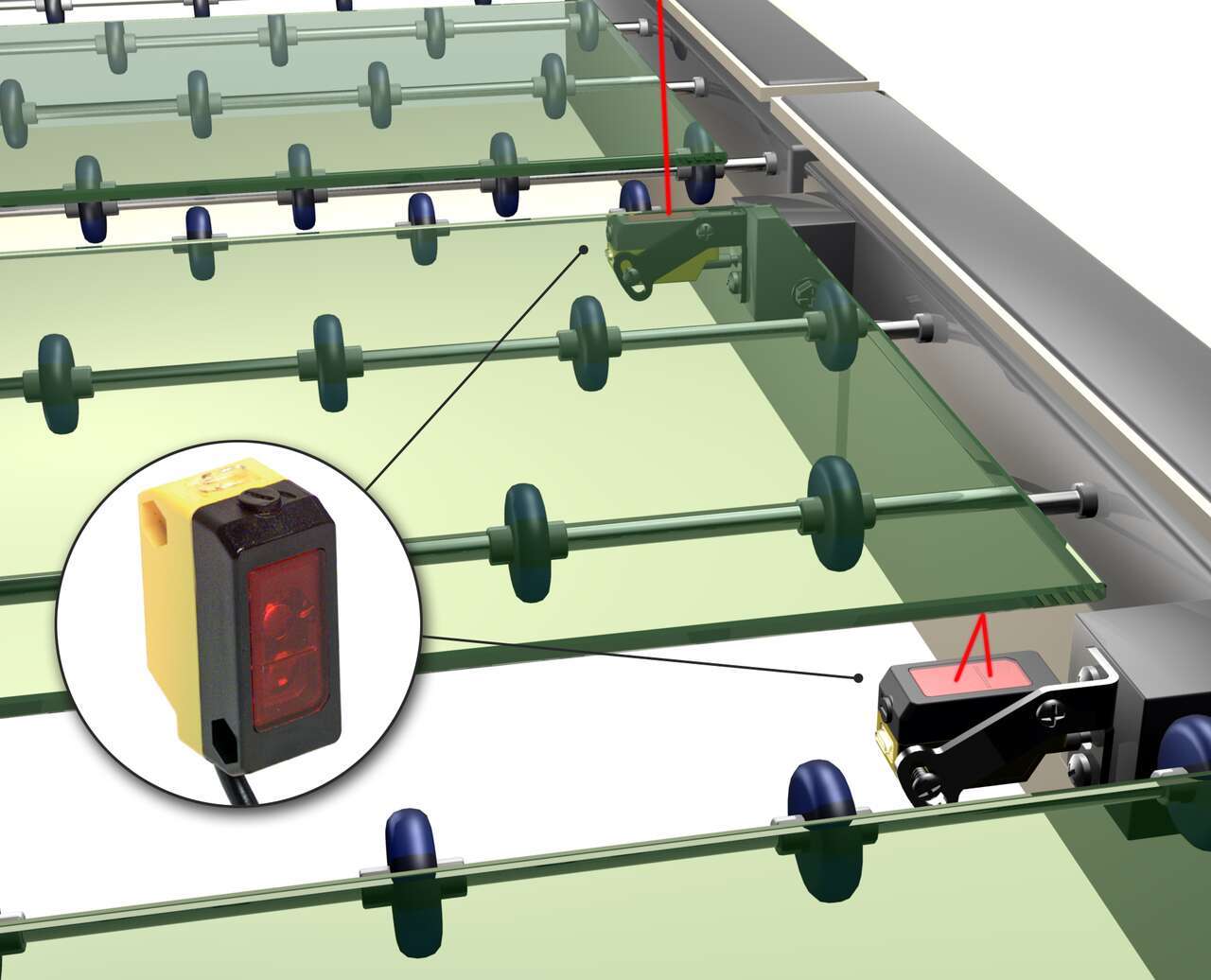
Détection de panneaux en verre
-
Détection d'une fuite de liquide à l'aide d'un détecteur QS18
-

Tri du courrier par taille
-
Objets sur un convoyeur
-

Contrôle du flux de cannettes de soda
-
Station d'admission automatique d'un système de tri
-
Contrôle qualité de proximité sur la chaîne de montage
-

Inspection des bouchons des bouteilles
-

Détection des bouchons de flacons de différentes couleurs
-

Vérification de positionnement des pièces
-
Contrôle des pièces sur le rail d'un distributeur
-
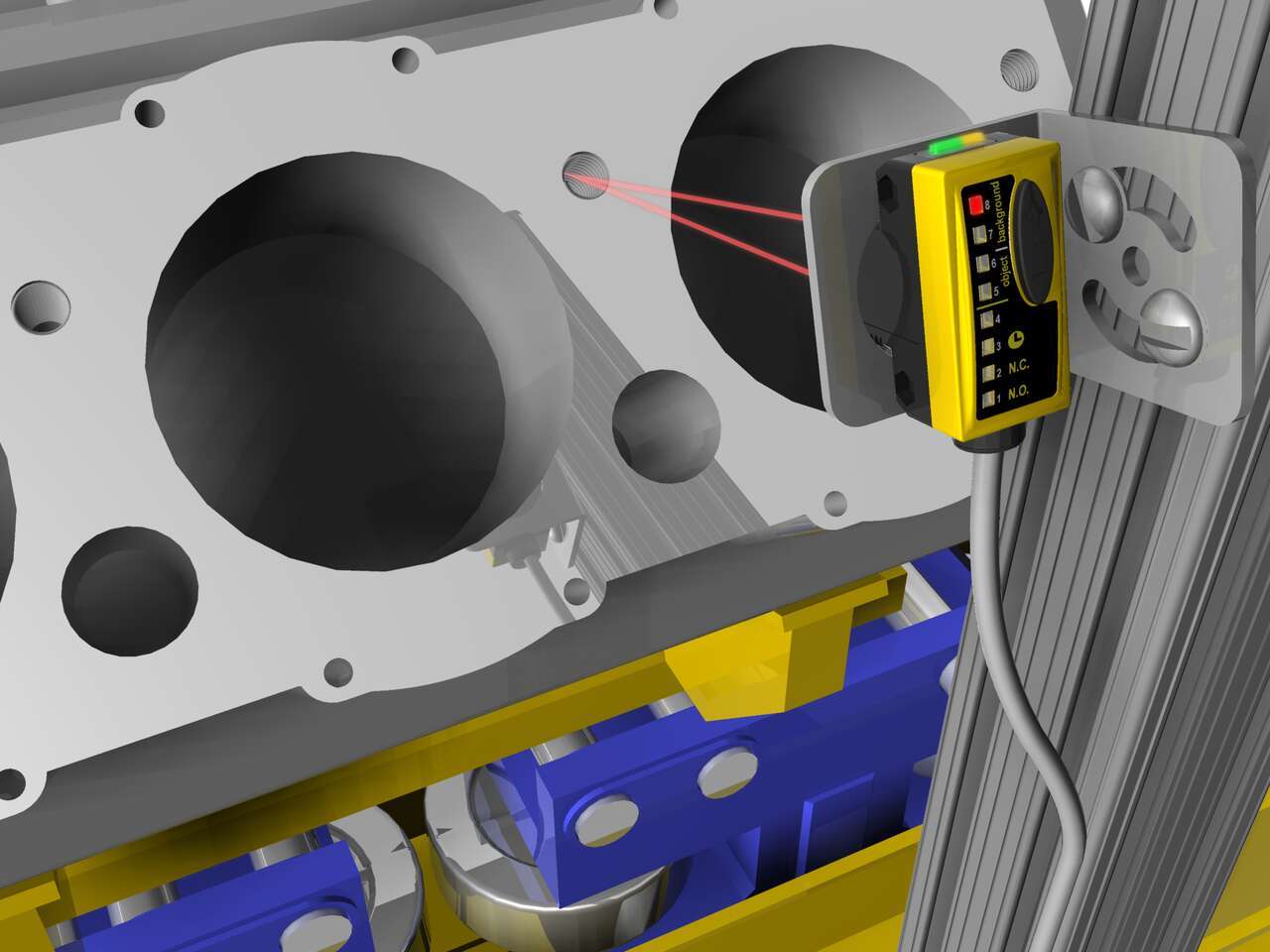
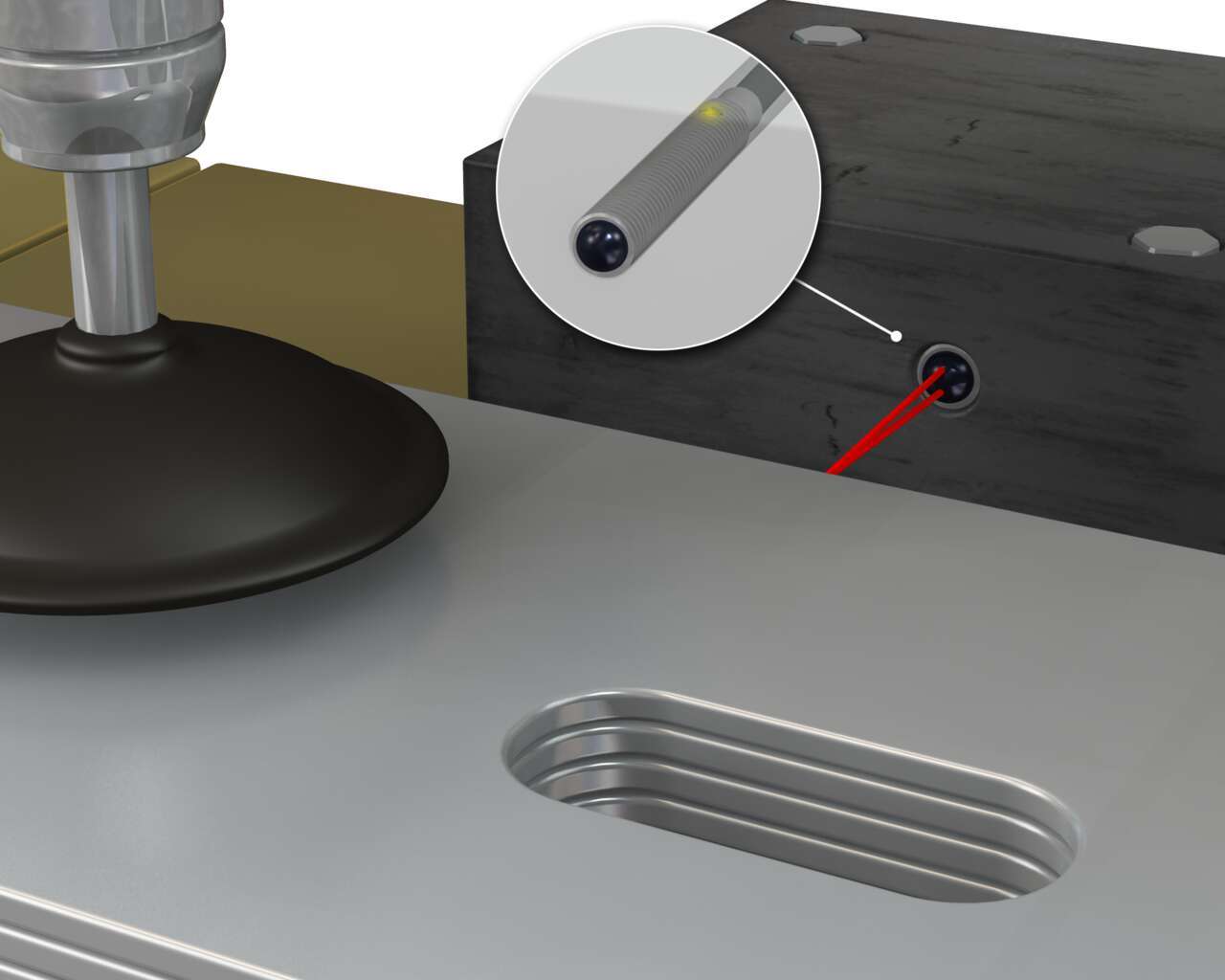
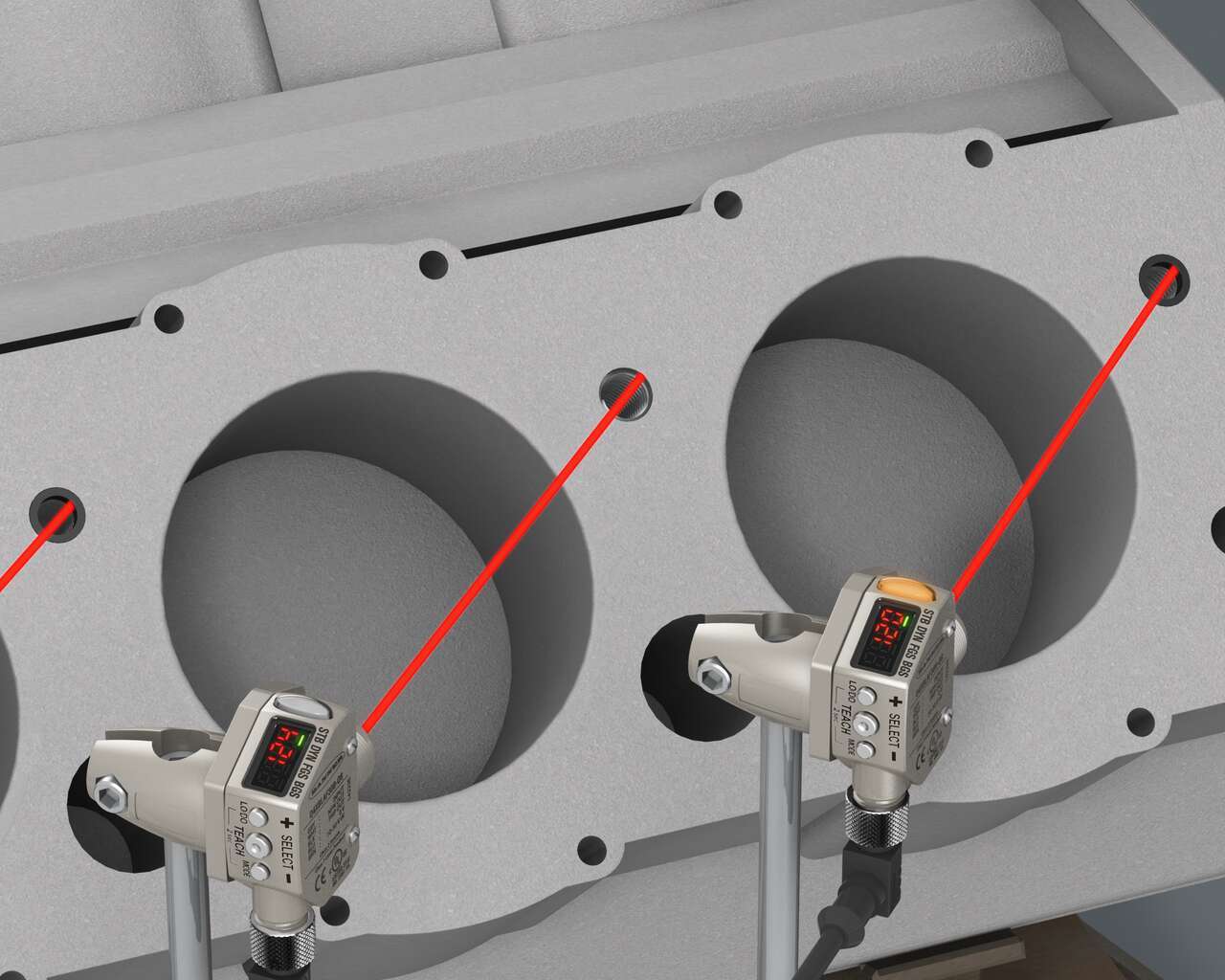
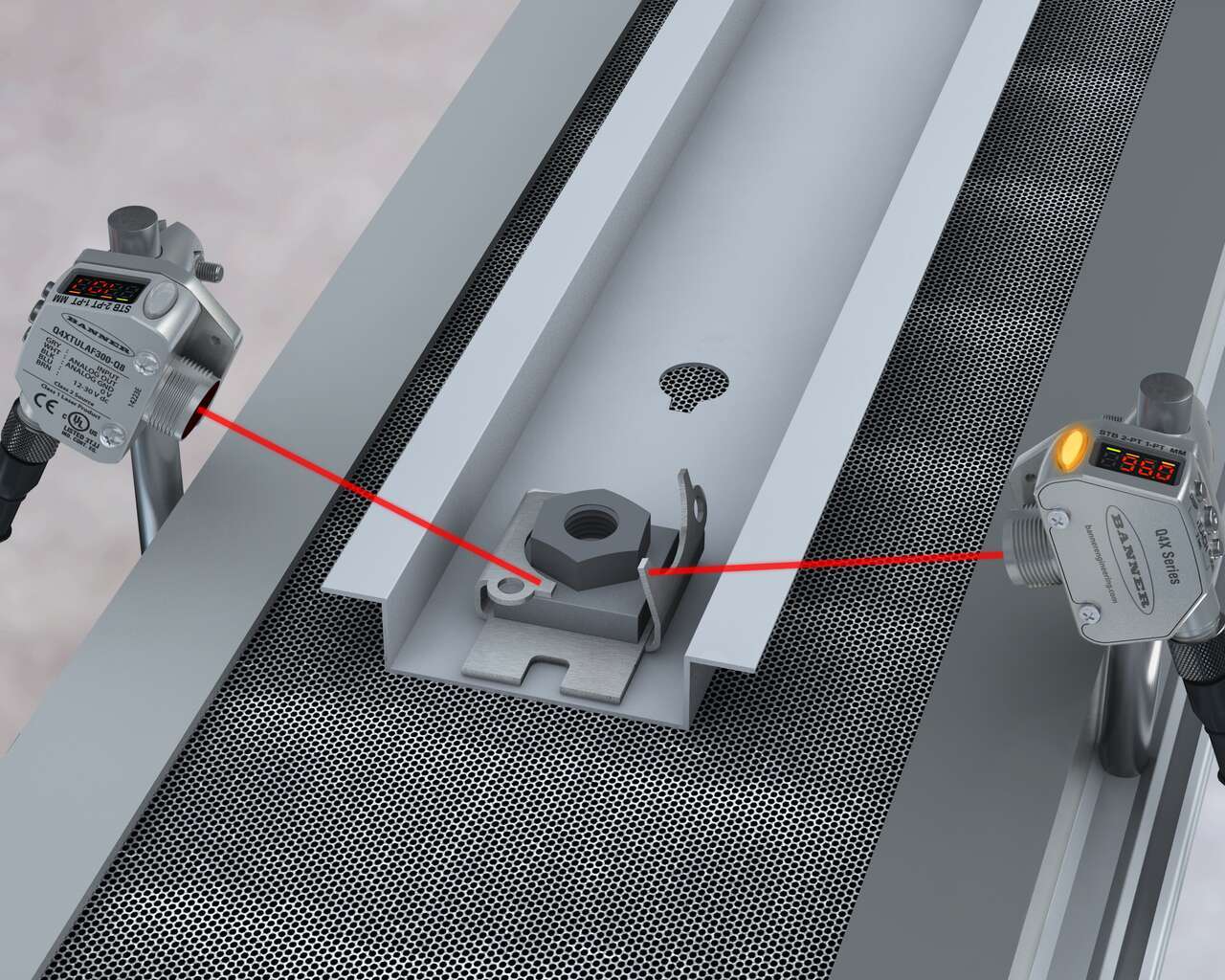
Détection de trou fileté
-

Suivi des flacons dans un laboratoire clinique automatisé
-

Détection de bocaux en verre transparent dans la zone de lavage des contenants de produits alimentaires
-
Détection d'emballages alimentaires en plastique transparent dans un environnement soumis à des conditions d'hygiène strictes
-

Détection d'emballages réfléchissants sur un convoyeur
-
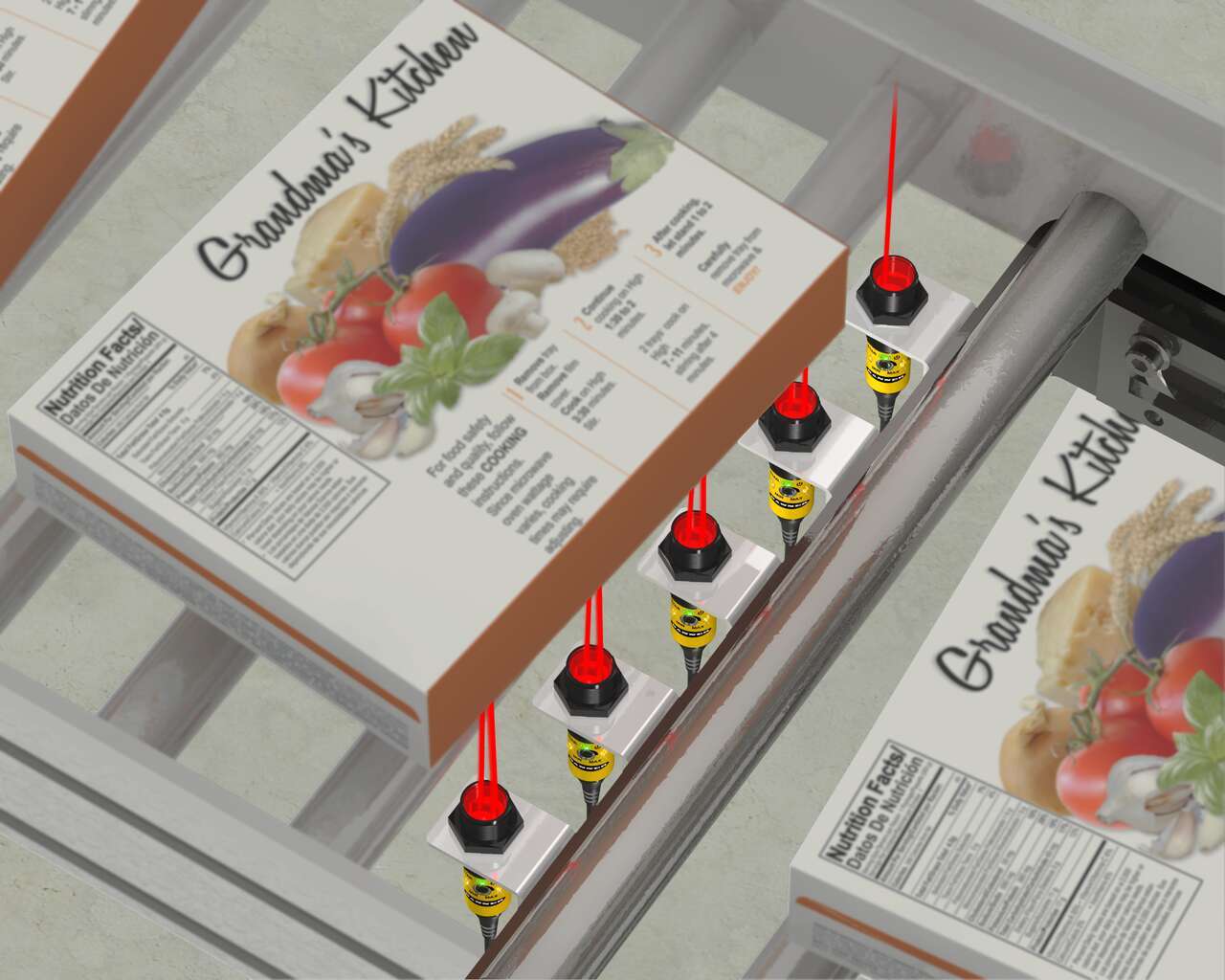
Packaging Frozen Dinners on a Cartoner
-

Car-wash
-

Cibles transparentes et réfléchissantes
-

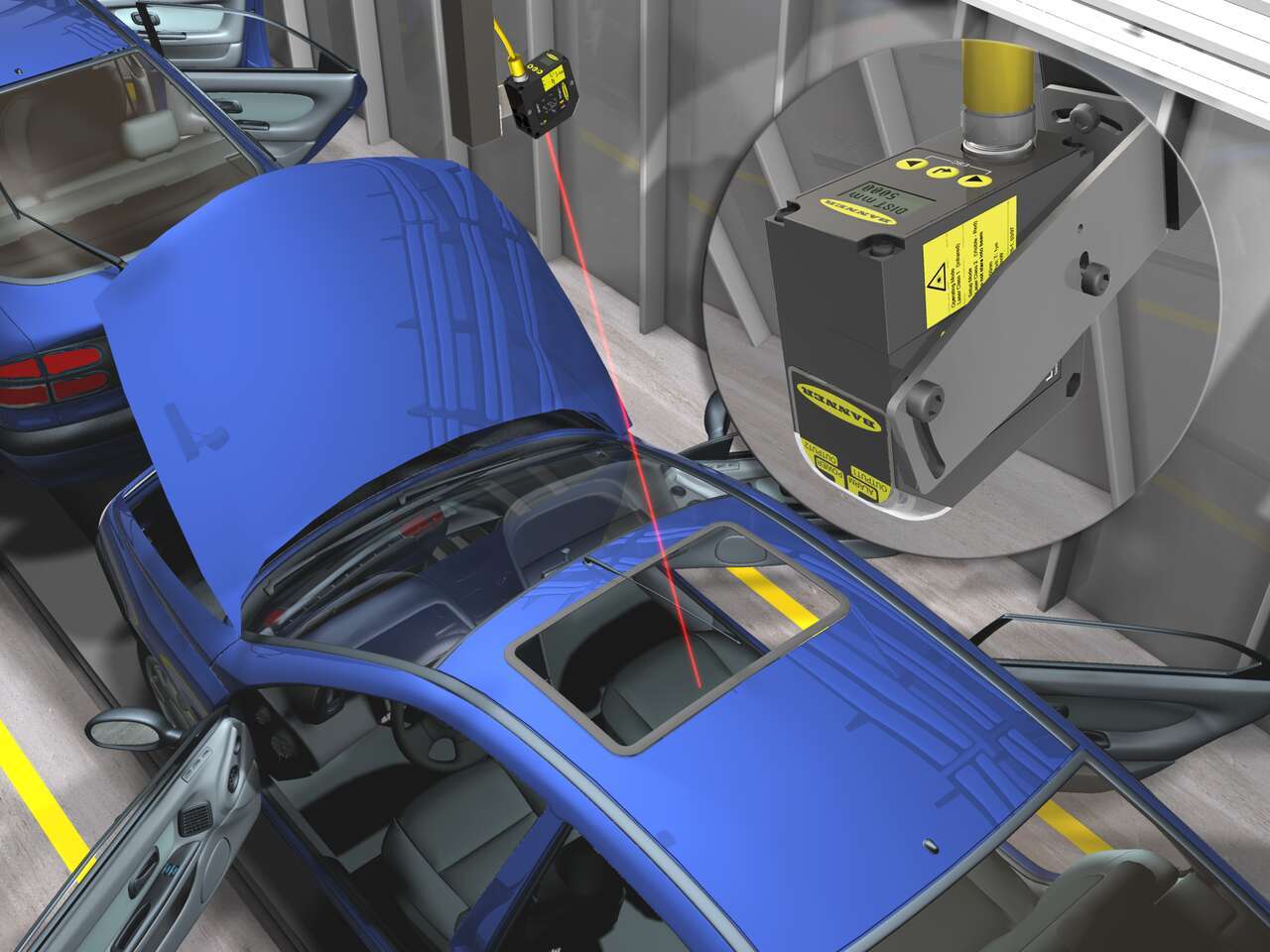
Détection de position de véhicules dans un car-wash automatique présentant des conditions extrêmes
-
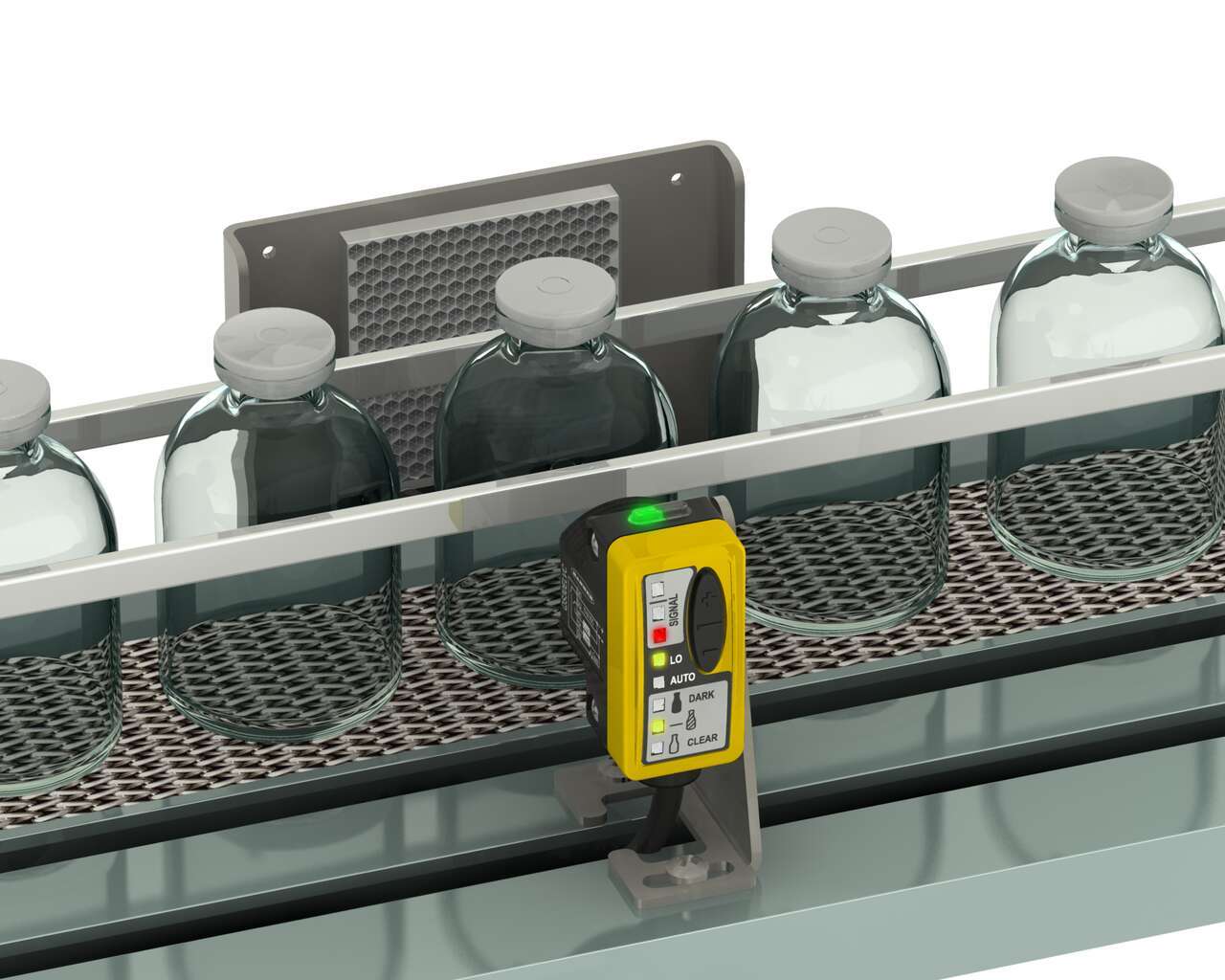
Comptage précis des flacons transparents dans le secteur pharmaceutique
Ressources
La nouvelle brochure Solutions de détection photoélectrique explore les différents types de capteurs Banner et explique comment choisir celui qui convient le mieux à votre application, qu’il s’agisse du comptage d’objets, du contrôle qualité, de la présence ou de l’absence d’objets ou d’autres besoins d’automatisation.
